崇仁街道PGR070L1-6-14-50机器人行星减速器
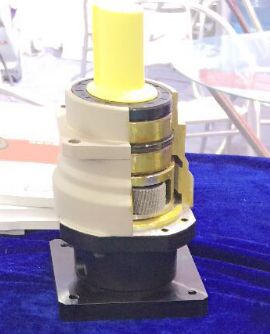
EAMON/伊明牌PT64系列精密盘面式行星减速机
圆形盘面法兰输出,安装牢固;
可以降低电机的转速,同时增大输出转矩;
具有重量轻、体积小;
传动比范围大、效率高;
运转平稳、噪声低、适应性强等特点。
适配电机功率:100W、400W、750W伺服电机,57、60、86步进电机等
适用于任何厂商所制造的驱动产品连接,如:松下、安川、三菱、富士、三洋、发那科、西门子、施耐德、科尔摩根、东元、台达、汇川、禾川、信捷等交流伺服电机、直流伺服电机、步进电机的减速传动。
崇仁街道PGR070L1-6-14-50机器人行星减速器
学习更多钳形电流表相关知识,请关注微信公众号“电工电气学习”。首先,就是要选对表的量程,这点要求测量之前就做到对要测的电流大小心中有数,当然,这只是大概的估算,这和万用表使用时差不多,估算出大概的电流,然后选择合适的量程测量,大量程测小电流会容易产生的误差会变大,而且测量值在变动不好确定。其次,就是钳形表因为有可开钳口,而钳口在我们工作中容易被尘污沾在上面,造成钳口密合不好,在使用前一定要保持钳口干净,还有一种情况就是表用久了,弹簧回力不足或钳口对合有偏位,也对测量有影响。
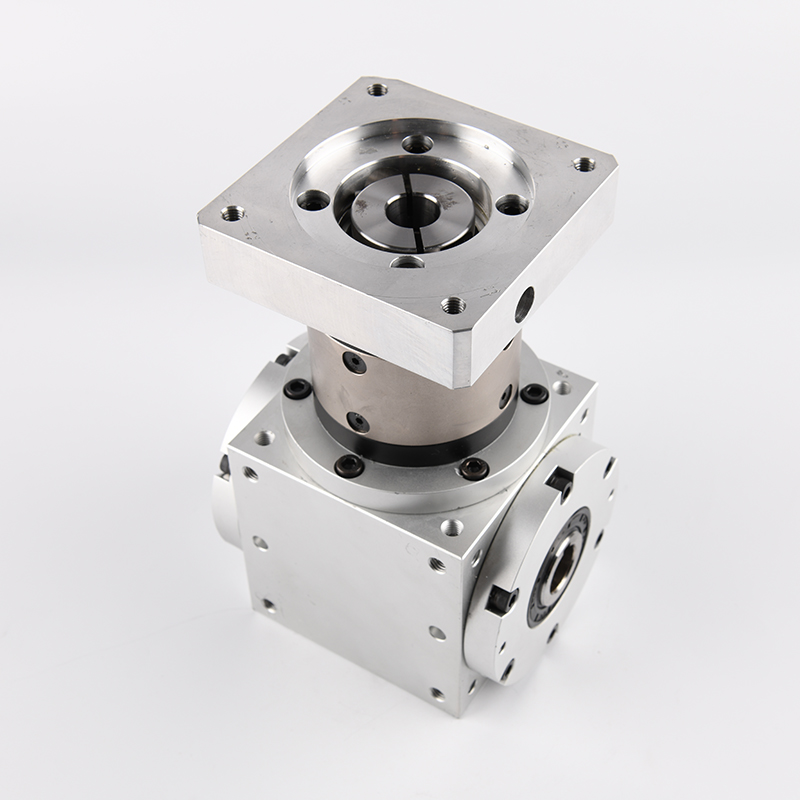
崇仁街道PGR070L1-6-14-50机器人行星减速器
VRB115-3-S2-P1-32-130-165-M10
VRB115-4-S2-P1-32-130-165-M10
VRB115-5-S2-P1-32-130-165-M10
VRB115-7-S2-P1-32-130-165-M10
VRB115-8-S2-P1-32-130-165-M10
VRB115-10-S2-P1-32-130-165-M10
VRB115-12-S2-P1-32-130-165-M10
VRB115-15-S2-P1-32-130-165-M10
VRB115-20-S2-P1-32-130-165-M10
VRB115-25-S2-P1-32-130-165-M10
VRB115-30-S2-P1-32-130-165-M10
VRB115-35-S2-P1-32-130-165-M10
VRB115-40-S2-P1-32-130-165-M10
VRB115-50-S2-P1-32-130-165-M10
VRB115-70-S2-P1-32-130-165-M10
VRB115-80-S2-P1-32-130-165-M10
VRB115-100-S2-P1-32-130-165-M10
VRB142-3-S2-P1-32-130-165-M10
VRB142-4-S2-P1-32-130-165-M10
VRB142-5-S2-P1-32-130-165-M10
VRB142-7-S2-P1-32-130-165-M10
VRB142-8-S2-P1-32-130-165-M10
VRB142-10-S2-P1-32-130-165-M10
VRB142-12-S2-P1-32-130-165-M10
VRB142-15-S2-P1-32-130-165-M10
VRB142-20-S2-P1-32-130-165-M10
VRB142-25-S2-P1-32-130-165-M10
VRB142-30-S2-P1-32-130-165-M10
VRB142-35-S2-P1-32-130-165-M10
VRB142-40-S2-P1-32-130-165-M10
VRB142-50-S2-P1-32-130-165-M10
VRB142-70-S2-P1-32-130-165-M10
VRB142-80-S2-P1-32-130-165-M10
VRB142-100-S2-P1-32-130-165-M10

ISO-on-TCPISO-on-TCP支持第4层TCP/IP协议的开放数据通信。用于支持SIMATICS7和PC以及非西门子支持的TCP/IP以太网系统。ISO-on-TCP符合TCP/IP,但相对于标准的TCP/IP,还附加了RFC1006协议,RFC1006是一个标准协议,该协议描述了如何将ISO映射到TCP上去。UDPUDP(UserDatagramProtocol,用户数据报协议),属于第4层协议,提供了S5兼容通信协议,适用于简单的交叉网络数据传输,没有数据确认报文,不检测数据传输的正确性。
崇仁街道PGR070L1-6-14-50机器人行星减速器






