航天镇PGX115-H-5准
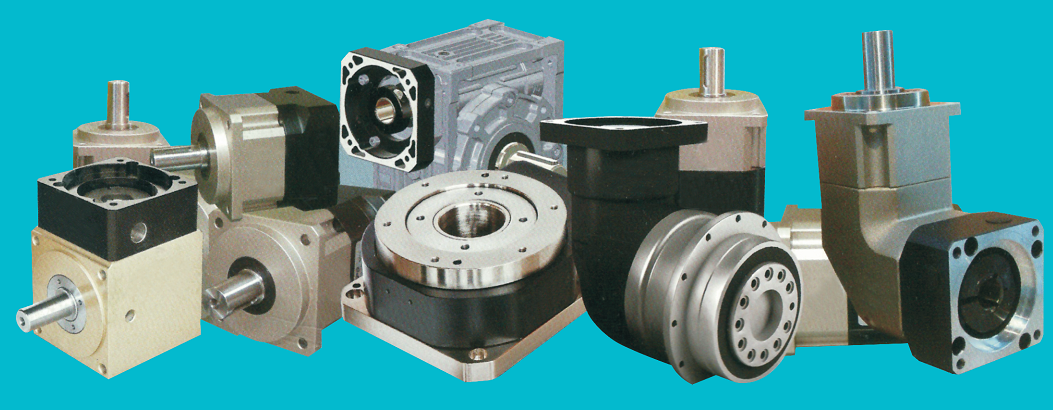
EAMON/伊明牌NBR斜齿高精度行星减速机产品优点:
1:本产品为斜齿轮,整机方壳直角输出,输出轴采用双轴承支撑,承载扭矩大;
2:解决重复要求高;
3:齿轮淬火硬度达62度,齿面磨齿;
4:表面采用烤漆处理,保证外观不变色,不生锈;
5:可配任意品牌的伺服和步进电机;如1000W松下电机行星减速机;
6: 回程间隙 标准≤5弧分,精密≤3弧分,超精密≤1弧分;
7: 防护等级:IP65;
8: 终身免维护;

航天镇PGX115-H-5准
从而在1s内发生溢出的次数(即溢出率)可由公式所示:从而波特率的计算公式由公式所示:在实际应用时,通常是先确定波特率,后根据波特率求T1定时初值,因此式又可写为:电路详解3串行通信实验电路图下面就对所示电路进行详细说明。系统部分(时钟电路、复位电路等)讲已经讲过,在此不再叙述。我们重点来了解下与计算机通信的RS-232接口电路。可以看到,在电路图中,有TXD和RXD两个接收和发送指示状态灯,此外用了一个叫MAX3232的芯片,那它是用来实现什么的呢?首先我们要知道计算机上的串口是具有RS-232标准的串行接口,而RS-232的标准中定义了其电气特性:高电平“1”信号电压的范围为-15V~-3V,低电平“0”信号电压的范围为+3V~+15V。

航天镇PGX115-H-5准
HR060-003-S1-P1
HR060-004-S1-P1
HR060-005-S1-P1
HR060-007-S1-P1
HR060-010-S1-P1
HR060-015-S1-P1
HR060-020-S1-P1
HR060-025-S1-P1
HR060-030-S1-P1
HR060-030-S1-P1
HR060-035-S1-P1
HR060-040-S1-P1
HR060-050-S1-P1
HR060-070-S1-P1
HR060-100-S1-P1
HR060-003-S2-P1
HR060-004-S2-P1
HR060-005-S2-P1
HR060-007-S2-P1
HR060-010-S2-P1
HR060-015-S2-P1
HR060-020-S2-P1
HR060-025-S2-P1
HR060-030-S2-P1
HR060-030-S2-P1
HR060-035-S2-P1
HR060-040-S2-P1
HR060-050-S2-P1
HR060-070-S2-P1
HR060-100-S2-P1
为本人所绘该题的电气线路控制原理图,大家看是不是非常繁杂,要想在一个小时内完成任务恐怕绝非易事。是将原封不动的转换为三菱FX2NPLC基本指令的梯形图,看起来也是非常繁琐的样子。系本人采用PLC内部计数器和触点比较指令绘制的梯形图,是不是较有所简化。原创稿件版权所有。至于则是本人使用三菱plc交替输出指令,编写的梯形图,是不是极为简单。诚然现代PLC所能实现的功能要远远高于本题所要求,在此仅以该试题为例告诉广大同行,在熟悉传统电气线路的基础上,还应紧跟电工技术发展趋势,不断学习进步。
航天镇PGX115-H-5准






