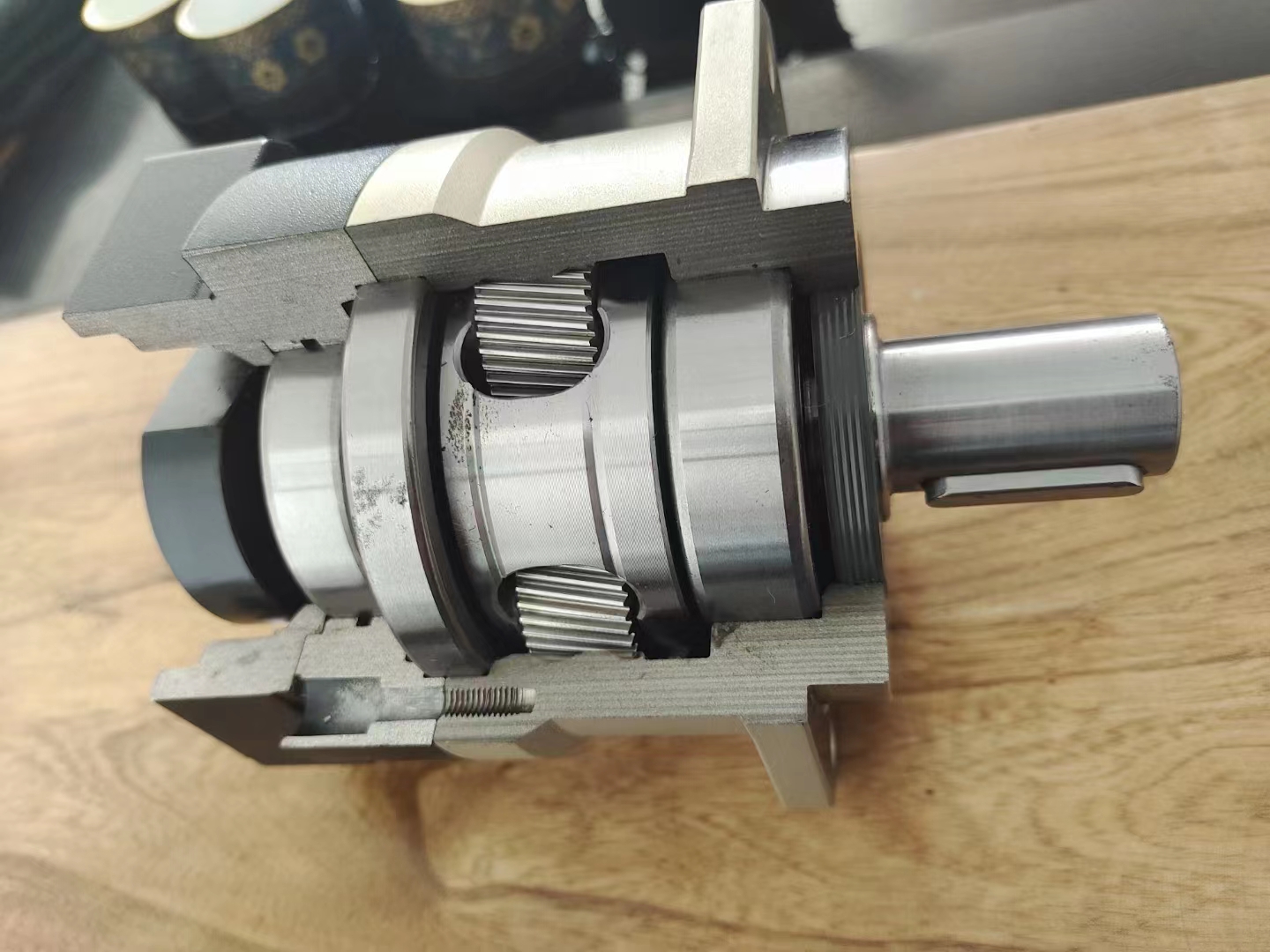
布海镇PG120-7-P2-S2-22-110传动轴
EAMON/伊明牌ABR142适用电机轴径:
L1:⌀22、24、35;
L2:⌀19、22、24、35;
精密行星减速机框号:
142;
ABR142精密行星减速机减速比:
单段速比:3, 4, 5, 6, 7, 8, 10,12,14, 20;
双段/三段速比:15, 25, 30, 35,40, 50, 60, 70, 80, 90,100, 120, 140, 160, 200;
ABR142精密转角行星减速机背隙:
单段:≤4arcmin / ≤6arcmin(P1/P2);
双段:≤7arcmin / ≤9arcmin(P1/P2);
ABR142精密转角减速机输出额定力矩:
T2N:450 Nm - 650 Nm;
ABR142精密转角行星减速机效率:
单段:≤ 95%;
双段:≤ 92% ;

布海镇PG120-7-P2-S2-22-110传动轴
如果逻辑块有执行完成需要保存的数据,显然应使用功能块,而不是功能。功能块的输出参数不仅与来自外部的输入参数有关,还与用静态变量保存的内部状态数据有关,功能因为没有静态变量,相同的输入参数产生的执行结果是相同。功能块有背景数据块DB,功能没有背景数据块,只能在功能内部访问功能的局部变量,其他逻辑块与人机界面可以访问相应背景数据块中的变量。不能给功能的局部比啊娘设置初始值,可以给功能块的局部变量(不包含TEMP)设置初始值,在调用功能块时如果没有设置某些输入参数的实参,将使用背景数据块中的初始值,或上一次执行后的值,调用功能时应给所有的形参实参。
布海镇PG120-7-P2-S2-22-110传动轴
SBR120-35-S2-P2-L2
SBR120-40-S2-P2-L2
SBR120-50-S2-P2-L2
SBR120-70-S2-P2-L2
SBR120-80-S2-P2-L2
SBR120-100-S2-P2-L2
SBR120-15-S2-P2-L2
SBR120-10-S2-P2-L1
SBR120-08-S2-P2-L1
SBR120-07-S2-P2-L1
SBR120-05-S2-P2-L1
SBR120-04-S2-P2-L1
SBR120-03-S2-P2-L1
SBR90-20-S2-P2-L2
SBR90-25-S2-P2-L2
SBR90-30-S2-P2-L2
SBR90-35-S2-P2-L2
SBR90-40-S2-P2-L2
SBR90-50-S2-P2-L2
SBR90-70-S2-P2-L2
SBR90-80-S2-P2-L2
SBR90-100-S2-P2-L2
SBR90-15-S2-P2-L2
SBR90-10-S2-P2-L1
SBR90-08-S2-P2-L1
SBR90-07-S2-P2-L1
SBR90-05-S2-P2-L1
SBR90-04-S2-P2-L1
SBR90-03-S2-P2-L1
SBR60-20-S2-P2-L2
SBR60-25-S2-P2-L2
SBR60-30-S2-P2-L2
SBR60-35-S2-P2-L2
SBR60-40-S2-P2-L2
SBR60-50-S2-P2-L2
SBR60-70-S2-P2-L2
SBR60-80-S2-P2-L2
SBR60-100-S2-P2-L2
SBR60-15-S2-P2-L2
SBR60-10-S2-P2-L1
SBR60-08-S2-P2-L1
SBR60-07-S2-P2-L1
SBR60-05-S2-P2-L1
SBR60-04-S2-P2-L1
SBR60-03-S2-P2-L1
VRB-060-3-S2-P1
VRB-060-4-S2-P1
VRB-060-5-S2-P1
VRB-060-7-S2-P1
VRB-060-8-S2-P1
VRB-060-10-S2-P1
VRB-060-15-S2-P1
VRB-060-20-S2-P1
VRB-060-25-S2-P1
VRB-060-30-S2-P1
VRB-060-35-S2-P1
VRB-060-40-S2-P1
VRB-060-50-S2-P1
VRB-060-70-S2-P1
VRB-060-80-S2-P1
VRB-060-100-S2-P1
VRB-090-3-S2-P1
VRB-090-4-S2-P1
VRB-090-5-S2-P1
VRB-090-7-S2-P1
VRB-090-8-S2-P1
VRB-090-10-S2-P1
VRB-090-15-S2-P1
VRB-090-20-S2-P1
VRB-090-25-S2-P1
VRB-090-30-S2-P1

步进电机的线圈通直流电时,带负载转子的电磁转矩(与负载转矩平衡而产生的恢复电磁转矩称为静态转矩或静止转矩)与转子功率角的关系称为角度-静止转矩特性,这就是电机的静态特性。如下图所示:因为转子为永磁体,产生的气隙磁密为正弦分布,所以理论上静止转矩曲线为正弦波。此角度-静止转矩特性为步进电机产生电磁转矩能力的重要指标,转矩越大越好,转矩波形越接近正弦越好。实际上磁极下存在齿槽转矩,使合成转矩发生畸变,如两相电机的齿槽转矩为静止转矩角度周期的4倍谐波,加在正弦的静止转矩上,则上图所示的转矩为:TL=TMsin[(θL/θM)π/2]其中TL与TM各表示负载转矩和静止转矩(或称把持转矩),相对应的功率角为θL和θM,此位移角的变化决定了步进电机位置精度。
布海镇PG120-7-P2-S2-22-110传动轴






