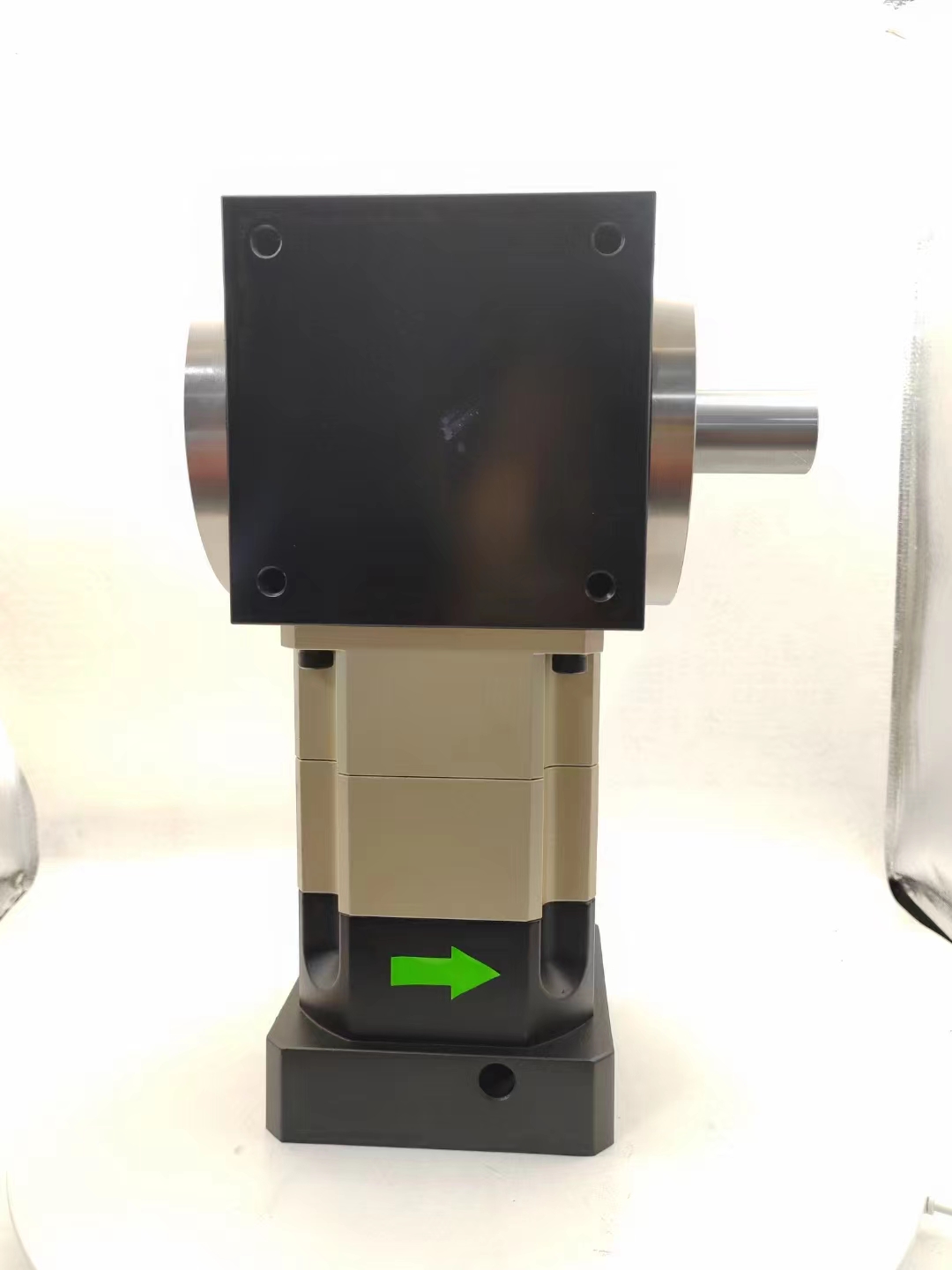
光荣乡VB090-15-S2-P1低背隙行星式减速机
EAMON/伊明牌PVFN系列直齿行星减速机系列
产品特点:
1、带有锥齿换向机构,可实现直角输出。
2、设计简洁,性能可靠,富有性价比。
3、锥齿副渗碳处理,硬度达HRC58,耐磨性优。
规格范围:
60-120
速比范围:3-100
精度范围:8-16弧分

光荣乡VB090-15-S2-P1低背隙行星式减速机
运动目标跟踪运动目标的跟踪,即通过目标的有效表达,在图像序列中寻找与目标模板最相似候选目标区位置的过程。简单说,就是在序列图像中为目标。运动目标的有效表达除了对运动目标建模外,目标跟踪中常用到的目标特性表达主要包括:视觉特征(图像边缘、轮廓、形状、纹理、区域)、统计特征(直方图、各种矩特征)、变换系数特征(傅里叶描绘子、自回归模型)、代数特征(图像矩阵的奇异值分解)等。除了使用单一特征外,也可通过融合多个特征来提高跟踪的可靠性,目前主流的方法有:基于区域匹配跟踪算法、基于轮廓匹配跟踪算法、基于特征匹配跟踪算法。

光荣乡VB090-15-S2-P1低背隙行星式减速机
PG120L2-30-22-95
PG120L2-30-22-110
PG120L2-30-24-95
RTM070AS-10-RF
PG120L2-30-19-70
PG120L2-30-19-80
PG120L2-30-19-110
PG120L2-30-14-50
PG120L2-30-16-70
PG120L2-30-16-80
MF40XL1-10-K-8-30100W
MF150XL2-28-K-35-114-S
MF90H-L1-4-M-S-19-70
MF60H-L1-3-M-S-14-50
PF90L2-40-16-80
PF90L2-40-16-70
PF90L2-40-19-80
pg90l2-40-16-70
pg90l2-40-16-80
PF90L2-30-19-80
PF90L2-30-19-70
PF90L2-30-19-110
PF90L2-30-14-50
PF90L2-30-16-70
PF90L2-30-16-80
PG90L2-30-19-80
PG90L2-30-19-70
PG90L2-30-19-110
PG90L2-30-14-50
PG90L2-30-16-70
PG90L2-30-16-80
AB180-050-S2-P2
TM142-015-S2-P1
ZDS060L2-100-14-50
ZDRH090L1-4-19-70
SP100S-MF1-7-0K0-2S
zdh060l1-10-14-50
ZDS180l2-25-35-114.3
ZDH150L1-5-7-35-114.3
WS150F-300-19-70-90-M6
RX142BL1-7-D1-35-114-200-M12
ZDL120L1-7-22-110
TP025S-MF1-5-0K1-2S
AD090M1-007-P1/SGMGV-13A
AB180-070-S2-P1
AB142-006-S2-P2
SK100S-MF1-10-2H1-1K00
SK+140S-MF1-5-0K1-1K00
WS70F-4A-20-14-50-70-M5
PG60L1-10-14-50-S-14
TP025S-MF1-5-0K1-2S
PG60L1-10-14-50-S-14
PG120L2-35-16-70
MF120SL2-35-16-70
PG120FL2-35-16-70
PG120L1-10-24-110
ZDH060L2-30-14-50
AB142-006-S2-P2
AB142-100-S2-P1
PGH142-3-P2(28-110-145-M8
DCS和PLC控制器的差别DCS和PLC控制器的主要差别是在开关量和模拟量的运算上,即使后来两者相互有些渗透,但是仍然有区别。80年代以后,PLC除逻辑运算外,也增加了一些控制回路算法,但要完成一些复杂运算还是比较困难,PLC用梯形图编程,模拟量的运算在编程时不太直观,编程比较麻烦。但在解算逻辑方面,表现出快速的优点。而DCS使用功能块封装模拟运算和逻辑运算,无论是逻辑运算还是复杂模拟运算的表达形式都非常清晰,但相对PLC来说逻辑运算的表达效率较低。
光荣乡VB090-15-S2-P1低背隙行星式减速机






