青树嘴镇机器人伺服行星减速器KBR090-10-S2-P1环保精密
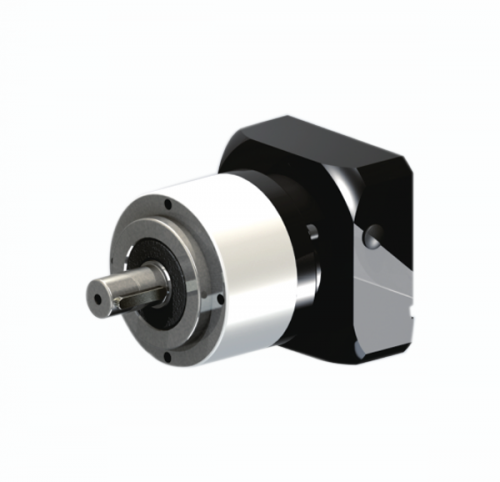
EAMON/伊明牌ABR180系列零误差行星减速机产品优点:
1:本产品为直角斜齿行星减速机,整机方壳,输出轴采用双轴承支撑,承载扭矩大;
2:解决重复要求高;
3:齿轮淬火硬度达62度,齿面磨齿;
4:表面采用烤漆处理,保证外观不变色,不生锈;
5:可配任意品牌的伺服和步进电机;如4.5KW三菱行星减速机;
6:回程间隙 标准≤5弧分,精密≤3弧分,超精密≤1弧分;
7:防护等级:IP65;
8:终身免维护;
速比明细:
单级:3 4 5 7 10
双级:12 15 16 20 25 28 30(次选)35 40 50 70(次选)100(次选)

青树嘴镇机器人伺服行星减速器KBR090-10-S2-P1环保精密
历史曲线图,历史报警表格查看历史数据和报警.2)巨控云平台的网页上,可以直接导出EXCEL数据表格和报警表格到电脑,供打印和处理。GRM500的历史数据和报警功能具备断线续传功能,即使记录的时候由于网络中断或者卡欠费,导致GRM500无法连接服务器,定时记录的数据会在模块下次上线后,补录到云服务器,并不会丢失历史数据。手机短信报警和1)只要在模块配置软件里面配置PLC发送短信的条件,内容接收人,到模块。

青树嘴镇机器人伺服行星减速器KBR090-10-S2-P1环保精密
VRB-140B-3-K5-28HB22
VRB-140B-4-K5-28HB22
VRB-140B-5-K5-28HB22
VRB-140B-6-K5-28HB22
VRB-140B-7-K5-28HB22
VRB-140B-8-K5-28HB22
VRB-140B-9-K5-28HB22
VRB-140B-10-K5-28HB22
VRB-140B-15-K5-28HB22
VRB-140B-16-K5-28HB22
VRB-140B-20-K5-28HB22
VRB-140B-25-K5-28HB22
VRB-140B-28-K5-28HB22
VRB-140B-30-K5-28HB22
VRB-140B-35-K5-28HB22
VRB-140B-40-K5-28HB22
VRB-140B-45-K5-28HB22
VRB-140B-50-K5-28HB22
VRB-140B-60-K5-28HB22
VRB-140B-70-K5-28HB22
VRB-140B-80-K5-28HB22
VRB-140B-90-K5-28HB22
VRB-140B-100-K5-28HB22
VRB-140B-3-K5-28HF22
VRB-140B-4-K5-28HF22
VRB-140B-5-K5-28HF22
VRB-140B-6-K5-28HF22
VRB-140B-7-K5-28HF22
VRB-140B-8-K5-28HF22
VRB-140B-9-K5-28HF22
VRB-140B-10-K5-28HF22
VRB-140B-15-K5-28HF22
VRB-140B-16-K5-28HF22
VRB-140B-20-K5-28HF22
VRB-140B-25-K5-28HF22
VRB-140B-28-K5-28HF22
VRB-140B-30-K5-28HF22
VRB-140B-35-K5-28HF22
VRB-140B-40-K5-28HF22
VRB-140B-45-K5-28HF22
VRB-140B-50-K5-28HF22
VRB-140B-60-K5-28HF22
VRB-140B-70-K5-28HF22
VRB-140B-80-K5-28HF22
VRB-140B-90-K5-28HF22
VRB-140B-100-K5-28HF22
它又分为两相、三相和五相,两相步进角一般为1.8度,三相步进角一般为1.2度,而五相步进角一般为0.72度。混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,经济型数控机床一般需用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。混合式步进电机特性输出转矩大,高转速。电机发热小,噪音低,效率高。高速停止平稳快速,无零速振荡运行平稳,振动噪声小。
青树嘴镇机器人伺服行星减速器KBR090-10-S2-P1环保精密






