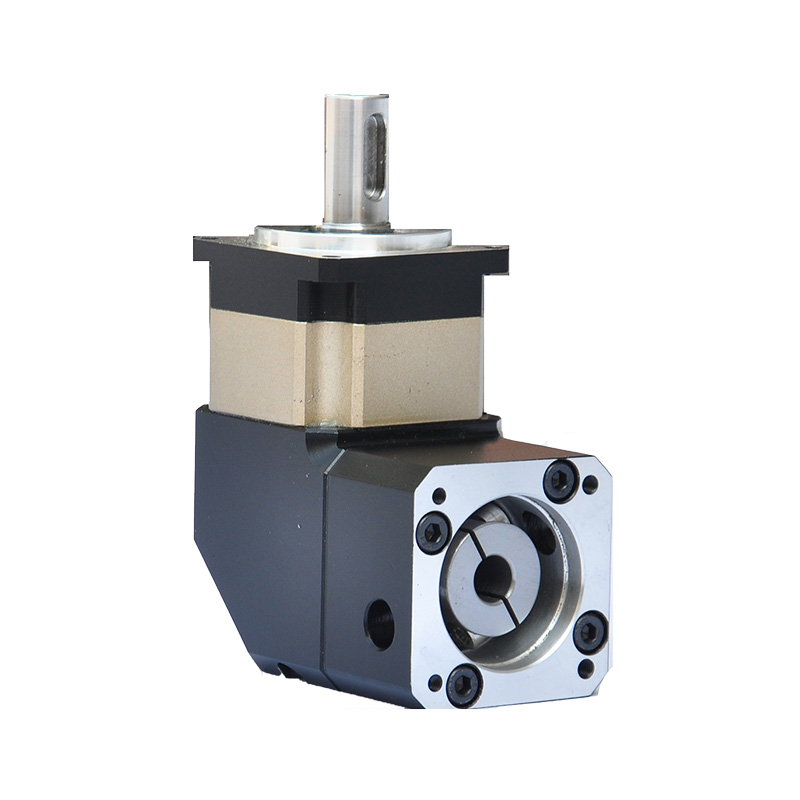
崇仁街道PF060L1-8-14-50机器人行星减速器
EAMON/伊明牌ABR系列行星减速机
● 低噪音:采用螺旋齿轮设计,实现了减速机的顺畅、安静运转。
● 高精度背隙可达3弧分以内,。
● 高刚性、高扭矩输出轴采用大尺寸,大跨距式双支撑轴承设计,大大提高了减速机刚性和扭矩。
● 率:单段可达95%以上,双段可达92%以上。
● 免维护:油脂磨耗低,可终身润滑。
● 密封效果好:润滑油脂具有高粘度、不易分离的特性,并采用IP65防护等级,确保无润滑油脂泄漏。
● 自由安装:可任意安装减速机。
● 适用性广;适用于任意型式伺服电机。

崇仁街道PF060L1-8-14-50机器人行星减速器
字符数组使用嵌套的办法,把一串字符组合成字符串,在c中充当字符串变量的作用。为了使用中的方便,c运行在声明字符数组时用字符串为字符数组初始化,在标准输入输出中,也同样提供了%s格式输入输出以及其他输入输出函数进行字符串的操作。相比较而言,数值数组就没有这么幸运,输入输出必须一个一个变量。对于字符串的处理,字符指针同样可以,c规定,把字符串常量赋给一个字符指针,就是把这个字符串常量的首地址赋给了这个指针,很明显,这个字符指针实际上变成了一个字符数组,只不过界限不明朗。
崇仁街道PF060L1-8-14-50机器人行星减速器
EVB060-3-S2-P1-14-50-70-M5
EVB060-4-S2-P1-14-50-70-M5
EVB060-5-S2-P1-14-50-70-M5
EVB060-7-S2-P1-14-50-70-M5
EVB060-8-S2-P1-14-50-70-M5
EVB060-10-S2-P1-14-50-70-M5
EVB060-15-S2-P1-14-50-70-M5
EVB060-20-S2-P1-14-50-70-M5
EVB060-25-S2-P1-14-50-70-M5
EVB060-30-S2-P1-14-50-70-M5
EVB060-40-S2-P1-14-50-70-M5
EVB060-50-S2-P1-14-50-70-M5
EVB060-70-S2-P1-14-50-70-M5
EVB060-100-S2-P1-14-50-70-M5
EVB060-3-S2-P1-14-50-70-M4
EVB060-4-S2-P1-14-50-70-M4
EVB060-5-S2-P1-14-50-70-M4
EVB060-7-S2-P1-14-50-70-M4
EVB060-8-S2-P1-14-50-70-M4
EVB060-10-S2-P1-14-50-70-M4
EVB060-15-S2-P1-14-50-70-M4
EVB060-20-S2-P1-14-50-70-M4
EVB060-25-S2-P1-14-50-70-M4
EVB060-30-S2-P1-14-50-70-M4
EVB060-40-S2-P1-14-50-70-M4
EVB060-50-S2-P1-14-50-70-M4
EVB060-70-S2-P1-14-50-70-M4
EVB060-100-S2-P1-14-50-70-M4
两相3.6°步进电机定子主极为4(在定转子间会产生不平衡电磁力,所以不鼓励使用此结构)时,依式Nr=m(nP±1/2),当P=2,m=2,n=6时,得Nr=25。小图为两相,定子4主极,3.6°的步进电机结构,其外形为42mm步进电机,用于5寸48TPI的FDD(软盘驱动器)上。当为三相时,由式Nr=m(nP±1/2),m=4,n=4,P=3,得Nr=50。定子主极数为mP=12,步距角θs为1.2°。
崇仁街道PF060L1-8-14-50机器人行星减速器






