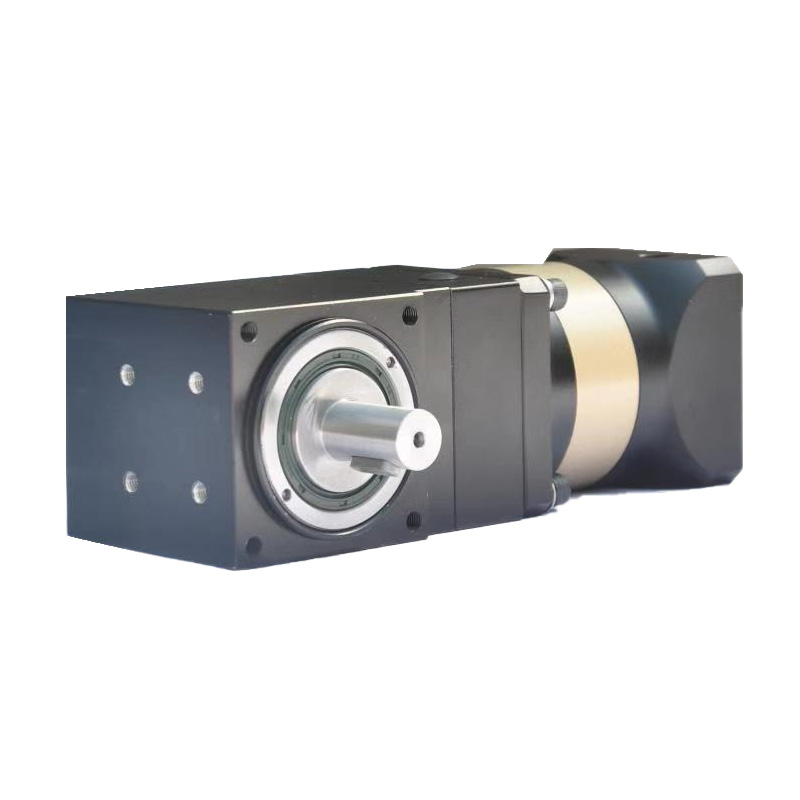
乐福堂乡TNF-090-40-S2-P1斜齿行星齿轮减速机
EAMON/伊明牌AB115精密行星减速机适用轴径:
适合轴径:≤28mm;
AB115精密行星减速机减速比:
单段速比:3, 4, 5, 7, 10;
双段速比:15, 20, 25, 30,35, 40, 50, 70, 100;
AB115精密行星减速机背隙:
单段:≤3arcmin / ≤5arcmin(P1/P2);
双段:≤5arcmin / ≤7arcmin(P1/P2);
AB115减速机输出额定力矩:
T2N:220 Nm -350 Nm;
AB115精密行星减速机效率:
单段:≤ 97%;
双段:≤ 94%;
AB115精密行星减速机配套:
可用于交流伺服马达、直流伺服马达、步进马达的减速传动;
乐福堂乡TNF-090-40-S2-P1斜齿行星齿轮减速机
控制系统设计控制系统没计包括信号处理及放大电路、校正装置、伺服电动机驱动电路等的详细设计,如果采用计算机数字控制,还应包括接口电路及控制器算法软件的设计。控制系统设计中应注意各环节参数的选择及与机械系统参数的匹配,以使系统具有足够的稳定裕度和快速响应性,并满足精度要求。系统性能复查所有结构参数确定之后,可重新列出系统的传递函数,但实际的伺服系统一般都是高阶系统,因而还应进行适当化简,才可进行性能复查。

乐福堂乡TNF-090-40-S2-P1斜齿行星齿轮减速机
KLF060 -L1 -3 4 5 7 10 -S2-P2
KLF060 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF080 -L1 -3 4 5 7 10 -S2-P2
KLF080 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF090 -L1 -3 4 5 7 10 -S2-P2
KLF090 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF120 -L1 -3 4 5 7 10 -S2-P2
KLF120 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF160 -L1 -3 4 5 7 10 -S2-P2
KLF160 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF115 -L1 -3 4 5 7 10 -S2-P2
KLF115 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF142 -L1 -3 4 5 7 10 -S2-P2
KLF142 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF60 -L1 -3 4 5 7 10 -S2-P2
KLF60 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF80 -L1 -3 4 5 7 10 -S2-P2
KLF80 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KLF90 -L1 -3 4 5 7 10 -S2-P2
KLF90 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2

上升沿和下降沿触发是两种非常重要的触发信号,也是plc编程中使用非常频繁的两种元素,今天就给大家讲述一下,如何在CFC语言中实现上升沿和下降沿触发。我曾在前文讲述过,CFC的实质就是可以自由移动的FBD,因此CFC和FBD的使用可以说是如出一辙,而FBD和LD又有着千丝万缕的联系,CFC实现上升沿和下降沿触发就是对功能块的调用。F_TRIG是指下降沿触发,其中F是英文FALL的缩写,是指下降的意思。
乐福堂乡TNF-090-40-S2-P1斜齿行星齿轮减速机






