越北镇自动化行星式减速机HB180-100-P2-S2可旋转
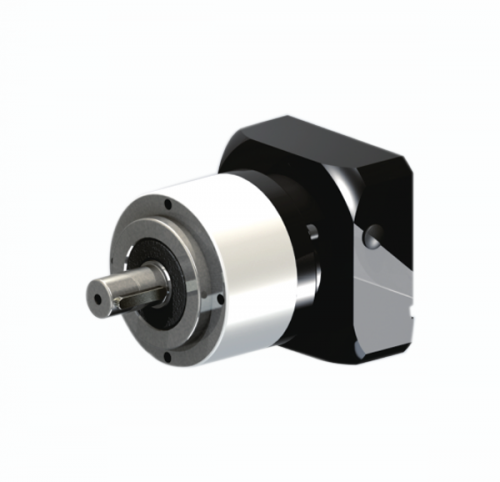
EAMON/伊明牌KFR系列精密直角行星减速机
产品特点:回程间隙小、精度长、传动更平稳、转动比范围广、效率高、寿命长、噪音小、体积小、安装更方便、外形美观。
安装方式:方形法兰输出,任意安装。
输入种类:交流伺服马达、直流伺服马达、步进马达。
型号分类:KFR40、KFR60、KFR90、KFR120、KFR160、KFR200
传动比分类:
一级速比:3、4、5、7、10
回程间隙:5-10arcmin
二级速比:12、15、16、20、25、28、35、40、70、100;
回程间隙:7-12arcmin
三级速比:64、80、100、125、160、200、250、280、350、400、500、700、1000
回程间隙:9-15arcmin
应用领域:精密机床、军工设备、冶金设备、风力发电设备,化工设备、太阳能、工业机器人、输送设备、工程机械、纺织设备、橡塑设备,食品机械、日用品机械、平面玻璃生产线、包装设备、印刷设备、汽车生产线等高精度场合的应用。
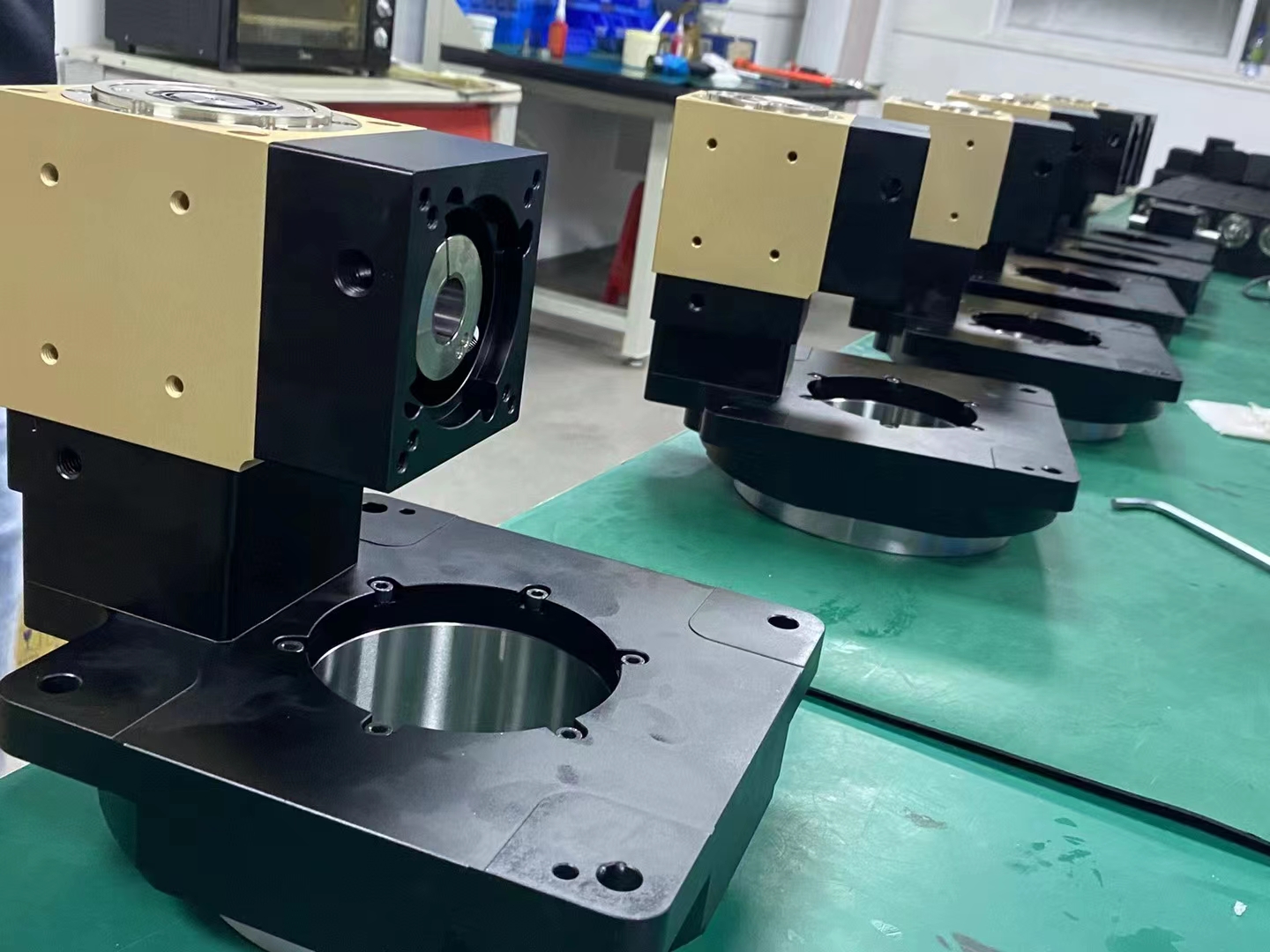
越北镇自动化行星式减速机HB180-100-P2-S2可旋转
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于装置。应用领域如数控机床、印刷机械等等。

越北镇自动化行星式减速机HB180-100-P2-S2可旋转
VRB-140-3-K5-28FE24
VRB-140-4-K5-28FE24
VRB-140-5-K5-28FE24
VRB-140-6-K5-28FE24
VRB-140-7-K5-28FE24
VRB-140-8-K5-28FE24
VRB-140-9-K5-28FE24
VRB-140-10-K5-28FE24
VRB-140-15-K5-28FE24
VRB-140-16-K5-28FE24
VRB-140-20-K5-28FE24
VRB-140-25-K5-28FE24
VRB-140-28-K5-28FE24
VRB-140-30-K5-28FE24
VRB-140-35-K5-28FE24
VRB-140-40-K5-28FE24
VRB-140-45-K5-28FE24
VRB-140-50-K5-28FE24
VRB-140-60-K5-28FE24
VRB-140-70-K5-28FE24
VRB-140-80-K5-28FE24
VRB-140-90-K5-28FE24
VRB-140-100-K5-28FE24
VRB-140-3-K5-28HA28
VRB-140-4-K5-28HA28
VRB-140-5-K5-28HA28
VRB-140-6-K5-28HA28
VRB-140-7-K5-28HA28
VRB-140-8-K5-28HA28
VRB-140-9-K5-28HA28
VRB-140-10-K5-28HA28
VRB-140-15-K5-28HA28
VRB-140-16-K5-28HA28
VRB-140-20-K5-28HA28
VRB-140-25-K5-28HA28
VRB-140-28-K5-28HA28
VRB-140-30-K5-28HA28
VRB-140-35-K5-28HA28
VRB-140-40-K5-28HA28
VRB-140-45-K5-28HA28
VRB-140-50-K5-28HA28
VRB-140-60-K5-28HA28
VRB-140-70-K5-28HA28
VRB-140-80-K5-28HA28
VRB-140-90-K5-28HA28
VRB-140-100-K5-28HA28
直接从输出端的取样对象来区分,若取样对象为输出电压,则为电压反馈;若取样对象为输出电流,则为电流反馈。在这里我们仍以电路为例,从该电路的输出端来看,取样对象为输出电压uo,由于Rf和R1组成分压器,使得反馈电压uf是uo的一部分,故为电压反馈。除公共接地线外,若输出信号与反馈信号从同一点引出,则为电压反馈;若输出信号与反馈信号从不同点引出,则为电流反馈。对于电路,反馈信号uf从输出端A点取出,而输出信号UO从O点取出,因它们取自不同点,故为电流反馈。
越北镇自动化行星式减速机HB180-100-P2-S2可旋转






