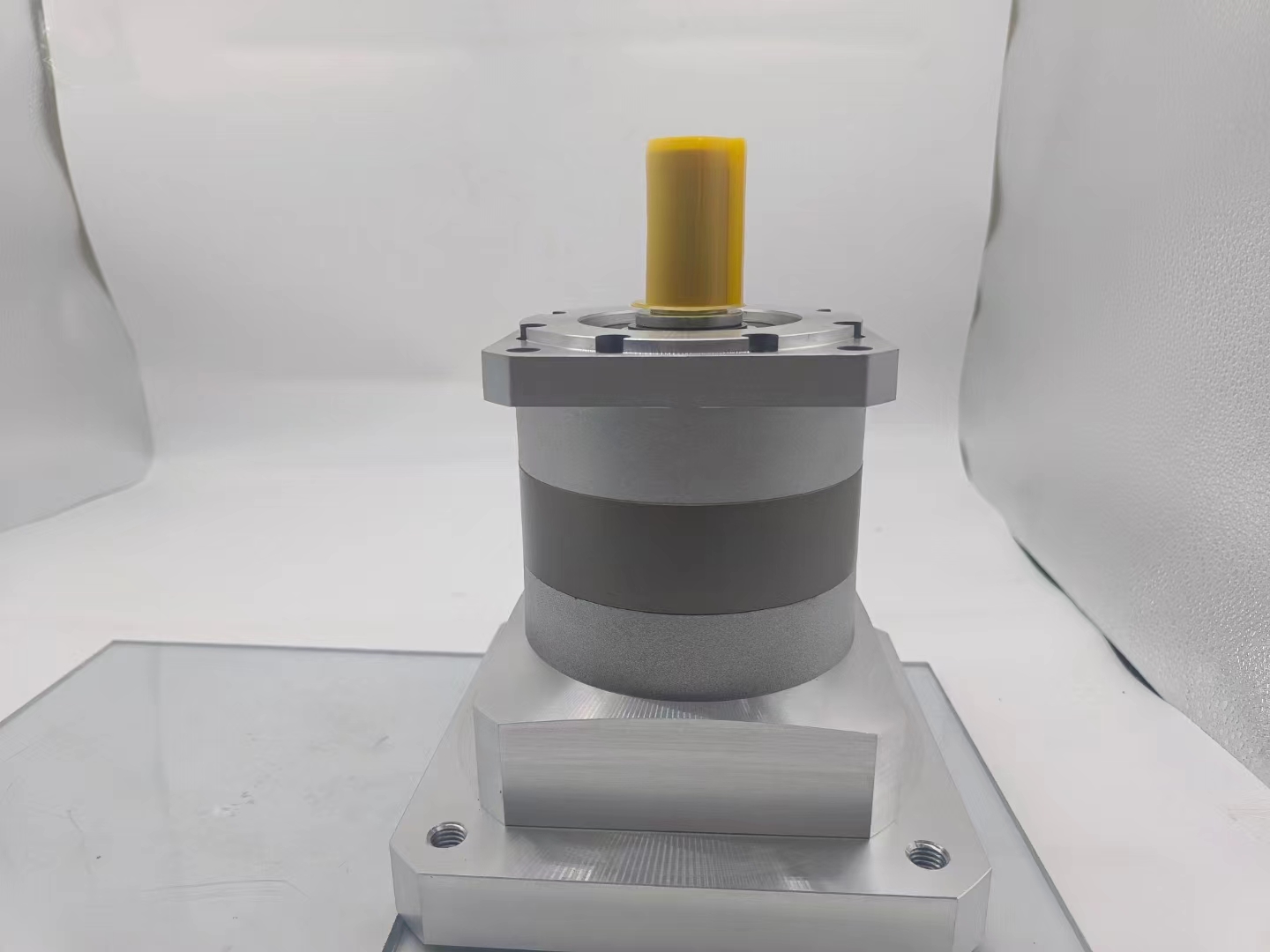
坛下乡NB90-6-S2-P1前帮机用行星减速机
EAMON/伊明牌TL系列行星减速机
● 低噪音:采用螺旋齿轮设计,实现了减速机的顺畅、安静运转。
● 高精度背隙可达3弧分以内,。
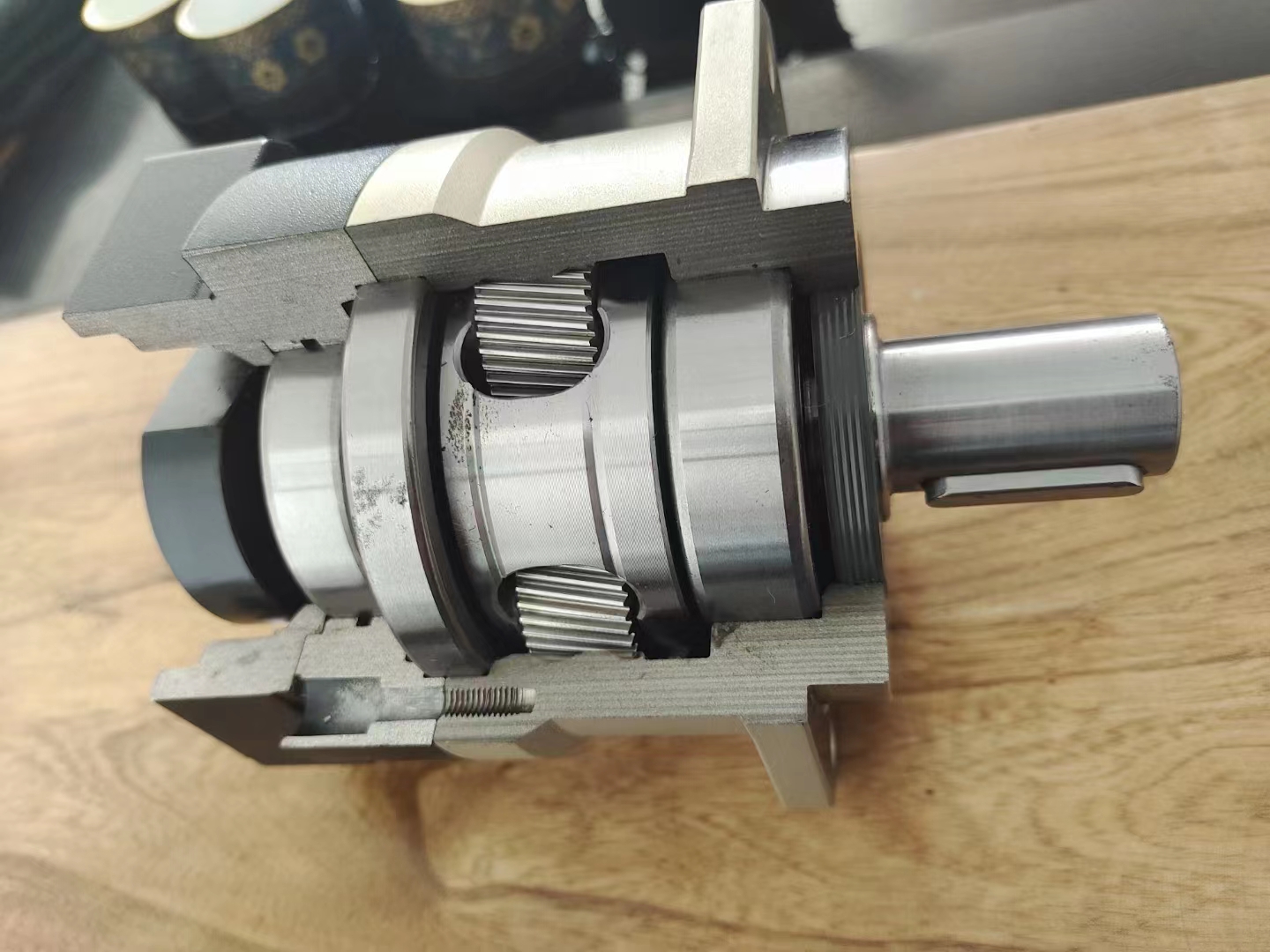
● 高刚性、高扭矩输出轴采用大尺寸,大跨距式双支撑轴承设计,大大提高了减速机刚性和扭矩。
● 率:单段可达95%以上,双段可达92%以上。
● 免维护:油脂磨耗低,可终身润滑。
● 密封效果好:润滑油脂具有高粘度、不易分离的特性,并采用IP65防护等级,确保无润滑油脂泄漏。
● 自由安装:可任意安装减速机。
● 适用性广;适用于任意型式伺服电机。

坛下乡NB90-6-S2-P1前帮机用行星减速机
如果用理论点的方法分析,就是看电压。电压的形成相对复杂,涉及到电荷电场,但是电压与电流是不可分割的,没有电压就没有电流的产生。电流的产生不是电压的目的,但是电压却是电流形成的原因。在以前物理学中喜欢用表示,不过却显得不是很恰当。PS:看电路图并不难,懂些技巧累积经验,不用死记硬背,记住几个常见的元件符号,并且记住上诉14个字。,a的上端与电路连接与否,都不影响电路,被右侧的红线部分给短路了,电流走红线部分。
坛下乡NB90-6-S2-P1前帮机用行星减速机
TSR-060-L1-R003-R004-R005-P1-P2
TSR-060-L1-R006-R007-R008-R010-P1-P2
TSR-060-L2-R015-R020-R025-R030-R040-P1-P2
TSR-060-L2-R050-R060-R070-R080-R100-P1-P2
TSR-090-L1-R003-R004-R005-P1-P2
TSR-090-L1-R006-R007-R008-R010-P1-P2
TSR-090-L2-R015-R020-R025-R030-R040-P1-P2
TSR-090-L2-R050-R060-R070-R080-R100-P1-P2
TSR-120-L1-R003-R004-R005-P1-P2
TSR-120-L1-R006-R007-R008-R010-P1-P2
TSR-120-L2-R015-R020-R025-R030-R040-P1-P2
TSR-120-L2-R050-R060-R070-R080-R100-P1-P2
TSR-150-L1-R003-R004-R005-P1-P2
TSR-150-L1-R006-R007-R008-R010-P1-P2
TSR-150-L2-R015-R020-R025-R030-R040-P1-P2
TSR-150-L2-R050-R060-R070-R080-R100-P1-P2
用正值与负值范围表的误差,称为位置误差(position),用基本步距角的百分率(%)来表示。下表表示静止角度误差:下图表示误差与位置精度:上图中,若正的误差为Δθ1,负的误差为Δθ4,则位置精度PA由下式表示:步距角精度:转子从任意一点出发,连续运行时,求出各步进角度的实测角度与理论上的步进角度之差,用理论步距角的百分率(%)表示,称为步距角精度,以1圈中的(+)侧与侧的值表示。
坛下乡NB90-6-S2-P1前帮机用行星减速机






