石岩街道PG120-20-P2-S2-24-110高精度行星齿轮减速机
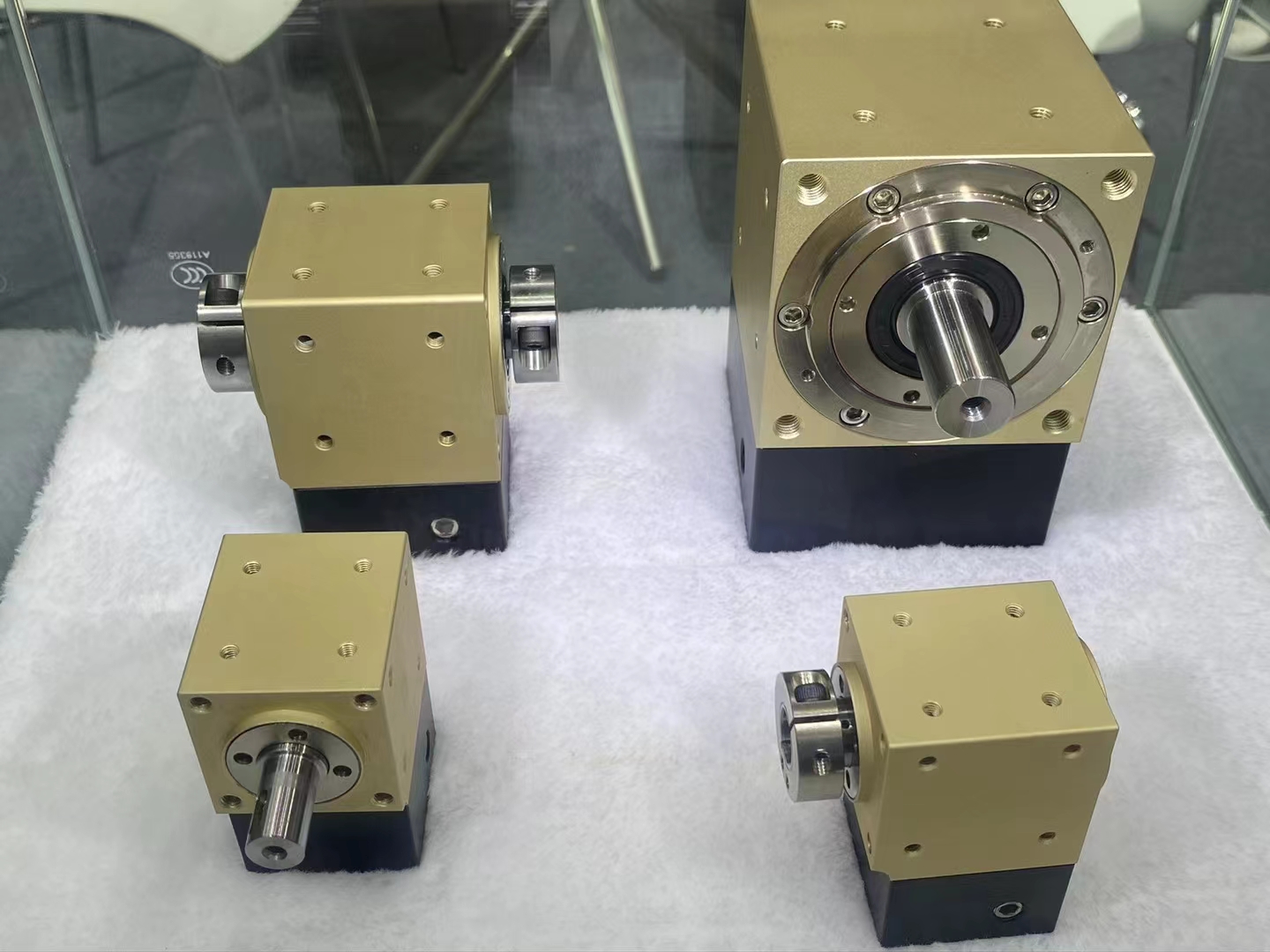
EAMON/伊明牌ADR110系列精密行星齿轮减速机产品优点:
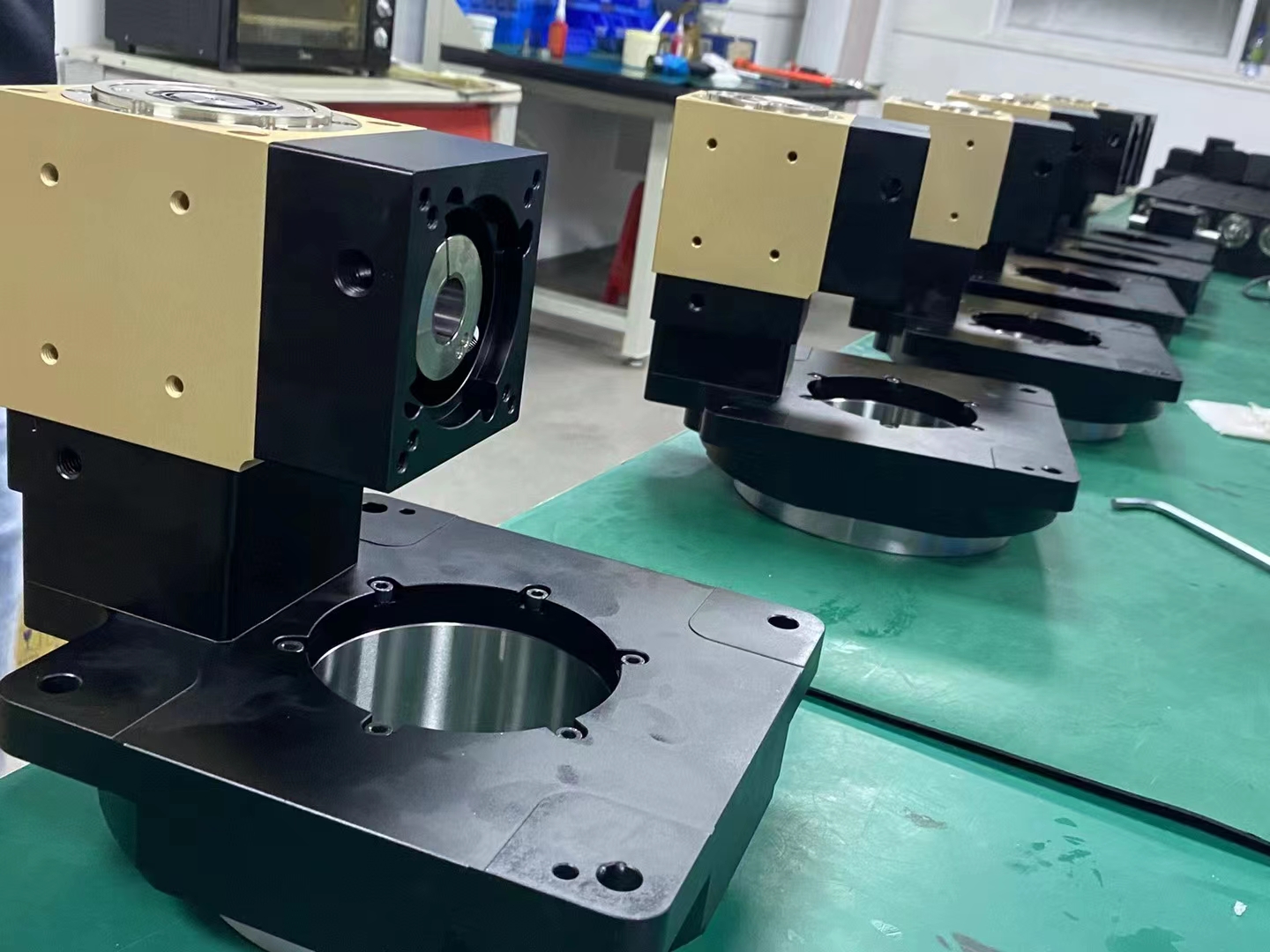
1:本产品为斜齿行星减速机,直角圆盘输出,输出轴采用双轴承支撑,承载扭矩大;
2:解决重复要求高;
3:齿轮淬火硬度达62度,齿面磨齿;
4:表面采用烤漆处理,保证外观不变色,不生锈;
5:可配任意品牌的伺服和步进电机;如130步进电机行星减速机;
6:回程间隙 标准≤5弧分,精密≤3弧分,超精密≤1弧分;
7:防护等级:IP65;
8:终身免维护;
速比明细:
单级:3 4 5 7 10
双级:12 15 16 20 25 28 30(次选)35 40 50 70(次选)100(次选)

石岩街道PG120-20-P2-S2-24-110高精度行星齿轮减速机
在总线模式下,不同的对象共享总线,独立编址、分时复用总线,CPU通过地址选择访问的对象,完成与各对象之间的信息传递。单片机三总线扩展示意如所示。数据总线51单片机的数据总线为P0口,P0口为双向数据通道,CPU从P0口送出和读回数据。地址总线51系列单片机的地址总线为16位。为了节约芯片引脚,采用P0口复用方式,除了作为数据总线外,在ALE信号时序匹配下,通过外置的数据锁存器,在总线访问前半周期从P0口送出低8位地址,后半周期从P0口送出8位数据。
石岩街道PG120-20-P2-S2-24-110高精度行星齿轮减速机
JRF060 -L1 -3 4 5 7 10 -S2-P2
JRF060 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF080 -L1 -3 4 5 7 10 -S2-P2
JRF080 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF090 -L1 -3 4 5 7 10 -S2-P2
JRF090 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF120 -L1 -3 4 5 7 10 -S2-P2
JRF120 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF160 -L1 -3 4 5 7 10 -S2-P2
JRF160 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF115 -L1 -3 4 5 7 10 -S2-P2
JRF115 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF142 -L1 -3 4 5 7 10 -S2-P2
JRF142 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF60 -L1 -3 4 5 7 10 -S2-P2
JRF60 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF80 -L1 -3 4 5 7 10 -S2-P2
JRF80 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
JRF90 -L1 -3 4 5 7 10 -S2-P2
JRF90 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
三相电机六个引出线头分不清首尾端,首先必须先判断别三相绕组的首尾端,才能进行电动机的Y形和三角形联结,定子绕组首尾端判别方法如下:用万用表判别一种方法是:首先用摇表或万用表欧姆档找出三相绕组每相绕组的两个引出线头。做三相绕组的假设编号UUVVWW2.再将三相绕组假设的三首三尾分别连接在一起,用上万用表,用毫安档或微安档测量,1。用手转动电动机转子,若万用表指针不动,则假设的首尾端均正确。若万用表指针摆动(如所示),说明假设编号的首尾有误,应逐相对调重调,直到万用表指针不动为止,此时连在一起的三首三尾正确。
石岩街道PG120-20-P2-S2-24-110高精度行星齿轮减速机






