
关键词:单轴机械手,直角坐标机器人、工业机械手、单臂机械手、梁式机械手、线性模组、电缸。
1. 命名方式:

例 SR - 48 - 12 - 400 - P - S3 - 100W
命名方式说明:
(1).类别:指产品的系列代号
SR---滚珠丝杠驱动方式的单轴机械臂;
(2).底座宽:指产品的本体宽度(mm)
48:底座宽48mm。
(3).导程:指驱动轮旋转一周滑块移动的距离。
可选导程:3mm,12mm。
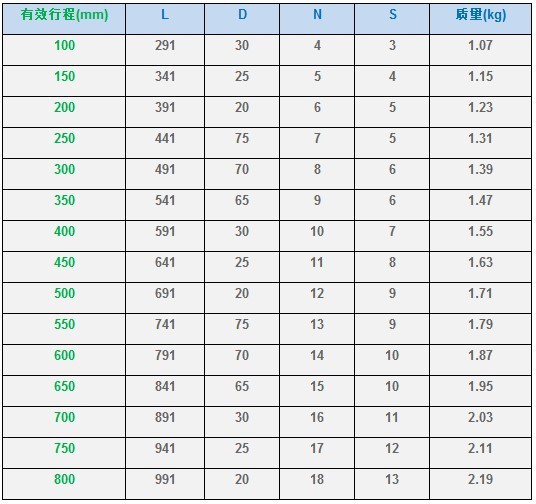
(4).有效行程:指滑块可移动的有效范围,也指滑块从零点位置移动到正限位的距离。
SR48系列滚珠丝杠型机械臂的普通有效行程为100-800mm;
(5).精度:指重复定位精度,表示反复移动到预先存储的位置时的定位精度。
研磨丝杆精密级P:±0.02mm;
滚轧丝杠标准型C: ±0.05mm;
(6). 位置开关:
S0---无位置开关;
S1---仅有1个零点开关;
S3---零点、正负限位共三组位置开关;
S4---零点、零点接近、正负限位共四组位置开关。
(7). 电机配置:
100W---100W伺服电机。
2. 技术参数:

3. 尺寸图及说明:

备注:
1.以上重量不含电机;
2.电机规格为台达B2系列100W伺服电机示例,电机外形和总长会因规格的变化而变化;
3.该规格的光电开关为内置式;
4.定位精度同时与电机的定位精度有关,当使用步进电机驱动时,定位精度应参考相应的步进电机参数;
5.有效行程超过400mm时会产生共振,行程每增加100mm时,最大速度应降低15%。请另作电话咨询。






