关于助力机械手
按结构形式差异,分为两种:软索式和硬臂式。
1)软索式助力机械手
它采用气动平衡吊为系统主机,配合抓取夹具、平面轨道滑动系统或相应基础,组成系统。
夹具通常是“定制”的,根据顾客的产品而设计。夹具可以被设计成通过各种形式来抓取工件。
由于,主机和夹具间通过一根钢丝绳连接,因此称之为软索式。
系统的气动平衡吊主机,利用气体动力学原理,达到系统的重力平衡和速度控制,实现省力化操作。
此类机械手,具有操作简便、扩展灵活、系统配置经济等特点而被广泛应用。
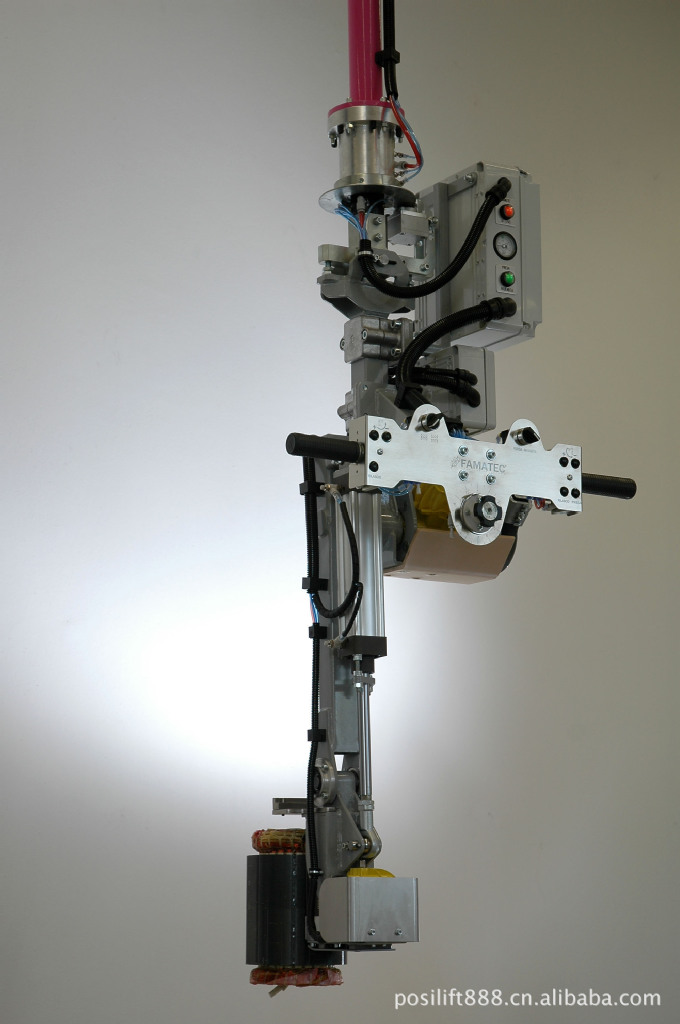
2)硬臂式助力机械手
根据工况的差异,选择相应的主机,配合抓取夹具、平面轨道滑动系统或相应基础,组成系统。
夹具通常是“定制”的,根据顾客的产品而设计。夹具可以被设计成通过各种形式来抓取工件
由于,系统基本是刚性臂杆结构组成,因此称之为硬臂式。
此类机械手,具有刚性手臂和全程重力平衡等诸多优点,因此被广泛应用于需要越过障碍、要求精确定位、取置状态受限、现场环境复杂、或系统承受扭力等场合。
硬臂式助力机械手可以实现提升最大600Kg的工件,半径最大可以达到3000mm,提升高度最大1500mm。根据搬运物料重量的不同,可选择不同型号的机械手。
安装方式:
落地固定式,落成叉车可移动式,吊顶固定式,吊顶导轨可移动式,带轮子可移动式,适合所有的工作区域。
易升设备(上海)有限公司算是国内最早从事助力机械手的公司,最开始代理年意大利品牌戴尔麦克的工业机械手,公司原来叫戴尔麦克(上海)有限公司直到2009年,公司更名, 在代理意大利另一品牌“Famatec”的机械手同时,自己也建有工厂,生产助力机械手。
我司是家澳大利亚公司,在上海这边有强大的设计队伍,有专业的外籍设计人员。提供
完善全面的售前售后服务。欢迎各界朋友来电咨询。电话:021-58601869 网站:www.posilift.com.cn






