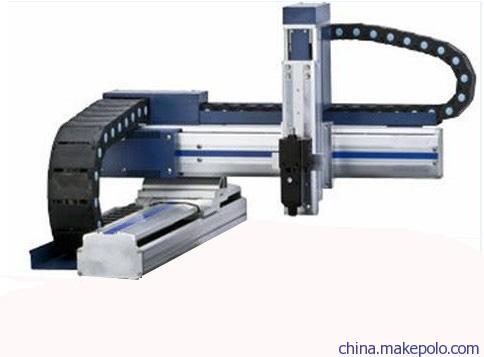
工业机器人直角坐标系列产品
Y轴底座固定,XZ轴随Y轴滑座移动,实现XYZ空间运动。
最常用组合结构,适用于工件的搬运,取放,定位等功能。
传动方式:标准型:滚珠丝杠传动(同步带传动可选)
重复定位精度:±0.02mm/axis
最大负载:依据实际选型而定
客户定制型规格。
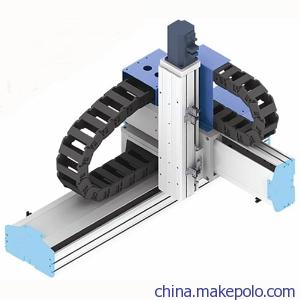
产品概要
最常用组合结构,适用于轻负载的工件的搬运,取放,定位等功能。
Y轴底座固定,XZ轴随Y轴滑座移动,实现XYZ空间运动。
Z轴本体固定,滑块上下移动。(正置)
技术参数
基本规格
负载范围(kg) | 0~15kg |
X轴行程范围(mm) | 100~400 |
Y轴行程范围(mm) | 100~1200 |
Z轴行程范围(mm) | 100~300 |
最高速度(mm/sec) | 500mm/sec |
马达系统 | 伺服电机或步进电机 |
普通规格
重复定位精度 | ±0.02mm/axis |
驱动机构 | 滚珠丝杠 |
感应器 | ①-LS,②HOME,③+LS OMRON EE-SX674 ×3组 |
感应器出线长度 | 标准出线长度:50cm |
基座材质 | 硬质挤压铝型材,白色光泽 |
安装面精度要求 | 平面度0.05mm以下 |
防尘设计 | 半封密防尘,粉尘颗粒环境不可用。 |
使用环境 | 0~40℃,85%RH(无凝结) |
※1 客制型规格,请以实际确认图面为准。
※2 可选配连接配件,拖链及走线槽。
※3 详细规格请致电本公司进一步洽询。
选型指南:
在选用多轴组合机械手臂的时候,一般应遵循下面的选型步骤:
第1步 | 依据客户使用要求确定机械手的组合样式。 |
第2步 | 确认搬运的负载重量。 |
第3步 | 确认各轴的工作行程。 |
第4步 | 确定各轴的重复定位精度和移动速度。 |
第5步 | 确定各轴电机的类型和功率(或扭力值)。 |
第6步 | 确定各轴的规格和马达安装样式。 |
第7步 | 确定走线槽布置方案及拖链的规格。 |
第8步 | 其他特殊工况的考虑和校核。 |
第9步 | 确定最终型号和2D/3D CAD图面确认。 |