起重机专用记录控制器:控制器采用高性能的ARM Cortex-M3 32位的RISC内核处理器处理专业的数学模型来计算角度、拉力。控制器采用串行FRAM存储芯片贮存基本臂长、最大角度、最大载荷重量、高差、长差、吊臂自重等关键信息控制器内置四个220V/3A 寿命长达10万次继电器报警,可供角度上限报警、角度下限报警、称重上限报警、称重上上限报警;控制器根据行业特性在组态中设置可调参数‘微据组态’;段数可修正折线的有效段数,可对过程、时间、角度进行修正。
一、信号输入(输入组态)
仪表提供两路输入通道,通道信息如下表所示:

二、参数计算(参数组态)
本仪表需手工输入六个基本参数:基本臂长、最大角度、最大载荷重量、高差、长差、吊臂自重。
1、额重计算
依据上述参数实时计算出在不同臂长、不同角度下的额重值。计算公式如下:


上述六大参数均在“参数”组态中设置(按光标处于参数首页末尾时按【向右键】可切换到第二页)。
注:在上述公式中,实际臂长与基本臂长统一使用“基本臂长”参数。
2、拉力与重力计算

其中
仪表测得的角度; C:力臂长度,本仪表固定为8.00;
A:参数‘高差’设定值;
B:参数‘长差’设定值;
F:仪表拉力测量值。
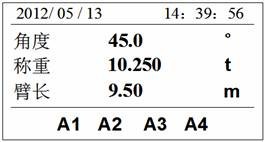
三、主显示界面
仪表总貌画面一为主测量显示画面,其主要显示了角度、称重、臂长、报警状态,如下图所示:
仪表总貌画面二(按【向右键】切换)为额重显示画面,其主要显示了臂幅、额重、拉力、报警状态,如下图所示:

四、控制组态
本仪表含有四个报警,依次为角度上限报警(A1)、角度下限报警(A2)、称重上限报警(A3)、称重上上限报警(A4)。
称重上限报警、称重上上限报警设定的值为当前额重的百分比,可设定的范围为0.0%至150.0%(一位小数);角度上限及角度下限的报警可设定的范围为0.0度至999.9度(控制组态中可设置各报警参数)。
仪表有2个蜂鸣器,当‘称重上限报警’或‘称重上上限报警’
触发时,一号蜂鸣器(短声)响;当‘角度上限报警’或‘角度下限报警’触发时,二号蜂鸣器(长声)响。
当‘角度上限报警’触发时,‘角度’通道闪烁,最下面代表角度上限报警状态的A1显示闪烁;其他报警点触发时,最下面代表相对应的An(n报警点编号)显示闪烁,An与继电器Kn一一对应,即A1报警时对应K1继电器动作,其余几个依次类推。
五、两种运算修正(微据组态)
‘修正’参数在‘微据’组态中设置。其中段数为需修正折线的有效段数,范围为0-7。
1、上升/下降过程修正
‘测量值’为角度值,‘修正显示值’为该段的修正系数,当测量角度小于或等于某段测量值时,重力就乘以该段的‘修正值’。
2、设置时间
意义为‘设定时间’为设定的时间长度,单位为秒。
3、设置角度
意义为在规定时间内角度的变化量,单位为度。
当在设定时间内角度增加量大于‘设定角度’为上升过程,如果在设定时间内角度减小量大于‘设定角度’为下降过程,上升过程仅‘上升修正’起作用,当下降过程时,在上升修正基础上再用‘下降修正’进行修正。






