概述
球杆系统是为自动控制、机械电子、电气工程等专业的基础控制课程而设计的教学实验设备,因具有开环不稳定的特性,需要设计控制器才能控制小球的位置,可满足自动控制原理、现代控制工程等课程的实验要求,也可以作为电机学、电机与拖动、模式识别等课程的实验设备。
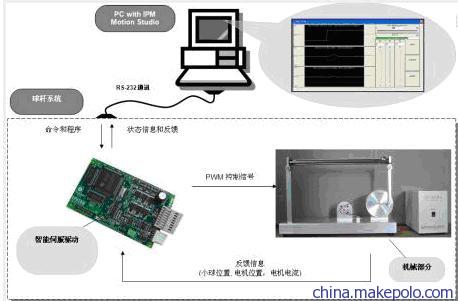
球杆系统分为执行系统和控制系统两大组成部分。
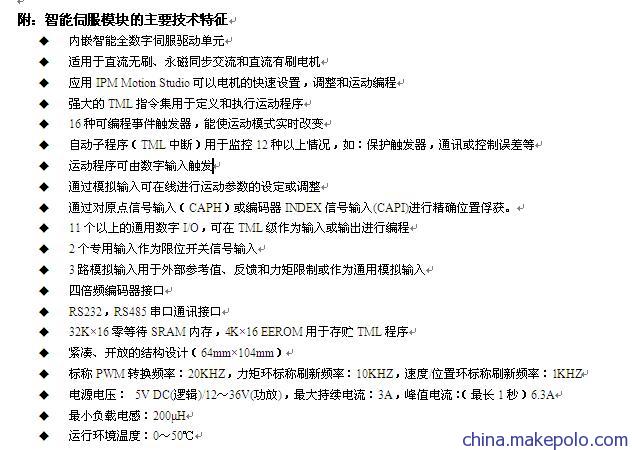
执行系统是一个典型的四连杆机构,横杆由一根带刻度的不锈钢杆和一根直线位移传感器组成,可以绕其左边的支点旋转,通过控制横杆的角度,就可以控制小球的在横杆上的位置。执行系统采用直流伺服电机驱动,通过控制电机轴的转角,就可以实现对横杆角度的控制。控制系统采用智能伺服运动控制器,它是基于最新DSP 控制器技术的24-36V,3A全数字智能伺服驱动单元,可以控制直流无刷、有刷或永磁同步交流电机。通过直线位移传感器采集小球的位置,控制器根据位置误差计算控制量,控制电机轴的转角,从而控制横杆的角度,使小球稳定到目标位置。
球杆系统实验软件采用嵌入式实时控制系统和MATLAB实时控制系统,嵌入式数字控制系统采用IPM Motion Studio图形化显示界面。MATLAB实时控制系统采用Simulink进行实时控制,方便用户进行各项基础实验以及算法开发。
系统特点
l
外形美观大方,开放式的机械和电气结构。
l
系统运行简单、易于操作、使用安全。
l
可以满足本科教学实验,课程设计,毕业设计以及算法研究等要求。
l
主要零部件采用工业常用零部件,系统运行可靠,使用寿命长。
系统模型
不考虑摩擦等因素的影响,该系统是一个典型的惯性系统,小球位置与电机输出转角的传递函数为:

主要技术指标

系统控制结构
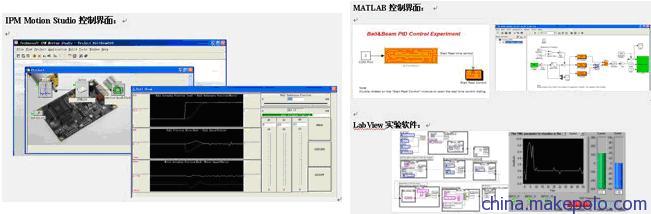
控制软件界面
IPM
Motion Studio及MATLAB控制界面
模拟量控制系统:
该模拟量控制系统采用典型的运算放大器和驱动芯片以及信号发生电路,可以搭建典型的信号跟随电路,PID控制电路,完成模拟量控制实验。
主要实验内容:
1.
信号跟随与滤波处理。
2.
典型环节的阶跃响应实验。
3.
模拟P,PD,PID控制器实验。
数字控制参考实验内容
l
系统建模,采用牛顿力学等方法对系统进行建模分析。
l
系统的开环响应特性分析。
l
PID控制器设计。
l
根轨迹控制器设计。
l
频率响应控制器设计。
l
用户自定义控制算法。
定购指南

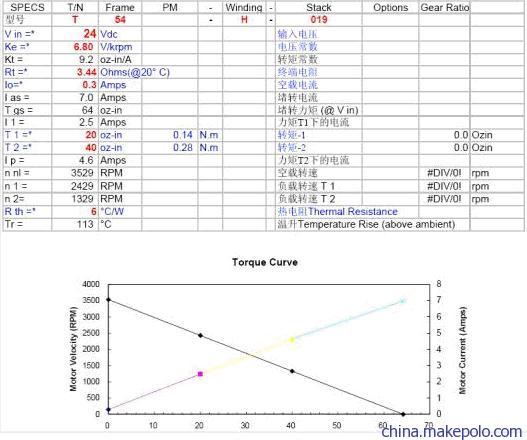
直流伺服的主要技术参数: