'

神弋智能停车诱导与反向寻车系统通过在每个车位上安装视频采集终端,对车位进行实时的图像采集,传输至反向寻车节点进行分析,完成判断车位状态,在有车状态识别所停车辆号牌,将相关信息传输至后台数据库管理中心,实现车位状态及车位信息的手机与管理。
在有车状态下,反向寻车节点将及时完成车位状态指示灯的状态切换,及时通知待车主车位的信息变化。
通过后台位置信息管理服务器与车辆引导管理的配合,有效地引导车辆到达合适的停车位置,有效的提高停车场内车辆的停车效率,帮助车主快速有效的停至车位,避免车辆在场内无效搜索,提高车位利用率效率。
车主返回车位过程中,可通过场内查询终端根据车牌号码完成车辆的位置查找,系统根据相关位置信息,选择一条最优路径提供给车主,帮助车主快速到达车辆所在位置,有效引导车主取车。
系统充分挖掘设备价值,根据客户需求,可通过系统后台功能扩展,充分利用反向寻车终端显示功能,根据管理需要,进行相关的信息发布,帮助业主充分发挥设备潜力,提供更好的服务。
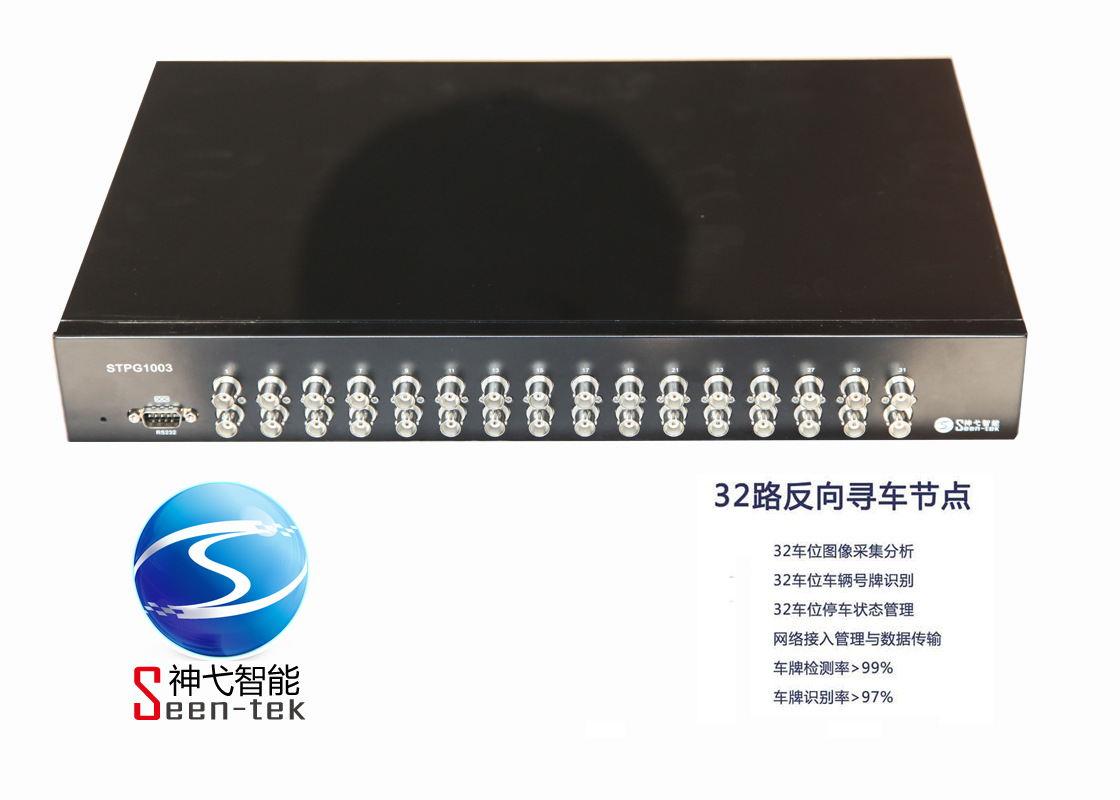
神弋智能反向寻车节点器,集成32路车位图像采集分析、32路车位号牌识别、32路车位停车状态管理、网络接入管理与数据传输、车牌检测率99.3%、车牌识别率》98%。
反向寻车节点是车位引导与反向寻车系统中的节点设备,主要完成视频分析,号牌识别,状态指示,数据传输等功能,可同时连接多路前端视频采集设备及状态指示灯,通过车位与设备的对应关联,实现车辆位置的精确定位。
反向寻车节点设备采用嵌入式系统架构设计,设备小巧,便于安装,超低功耗,免维护工程化设计,保障了设备的长期稳定运行,降低能源消耗,并提供完善的系统二次开发接口,可很好的满足二次开发的续期。


'




