
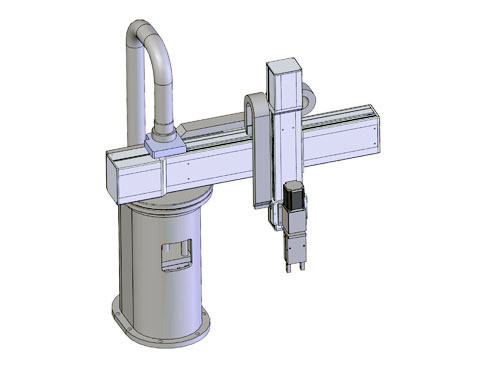
水平多关节机器人








YL系列机器人技术参数表
大工作空间
采用垂直多关节串联结构,YL系列机器人的有效载荷最高达50kg,到达距离最长可达1850mm,是同类机器人的佼佼者。
稳定的高精度性能
具有最佳的重复定位精度(±0.05mm),并且在长时间工作状态下,机器人高精度不受任何影响,确保零件生产质量的稳定性。
型号 项目 | YL03 | YL08 | YL20 | YL50 | ||||
自由度 | 6 | 6 | 6 | 6 | ||||
驱动方式 | 交流伺服驱动 | 交流伺服驱动 | 交流伺服驱动 | 交流伺服驱动 | ||||
有效负载 | 3kg | 8kg | 20kg | 50kg | ||||
重复定位精确 | ±0.05mm | ±0.05mm | ±0.08mm | ±0.07mm | ||||
运动范围 | J1轴 | ±170° | ±170° | ±170° | ±180° | |||
J2轴 | +150°~ -60° | +120°~ -85° | +133°~ -95° | +130°~ -90° | ||||
J3轴 | +75°~ -170° | +85°~ -170° | +76°~ -166° | +280°~ -160° | ||||
J4轴 | ±190° | ±180° | ±180° | ±360° | ||||
J5轴 | ±125° | ±135° | ±133° | ±120° | ||||
J6轴 | ±360° | ±360° | ±360° | ±360° | ||||
额定速度 | J1轴 | 2.62rad/s,150°/s | 2.09rad/s,120°/s | 1.90rad/s,109°/s | 1.23rad/s,70°/s | |||
J2轴 | 2.62rad/s,150°/s | 2.09rad/s,120°/s | 1.30rad/s,74.5°/s | 1.12rad/s,64°/s | ||||
J3轴 | 3.14rad/s,180°/s | 2.09rad/s,120°/s | 1.74rad/s,100°/s | 0.90rad/s,50°/s | ||||
J4轴 | 4.71rad/s,270°/s | 3.93rad/s,225°/s | 3.93rad/s,225°/s | 2.51rad/s,144°/s | ||||
J5轴 | 4.71rad/s,270°/s | 2.53rad/s,145°/s | 2.56rad/s,147°/s | 2.92rad/s,167°/s | ||||
J6轴 | 4.71rad/s,270°/s | 5.24rad/s,300°/s | 5.16rad/s,296°/s | 5.10rad/s,292°/s | ||||
周围环境 | 温度 | 0-45摄氏度 | ||||||
湿度 | 20-80%(不结霜) | |||||||
其他 | 1 避免与易燃易爆及腐蚀性气体,液体接触 2 勿溅水,油,粉尘 3 远离电器噪声源(等离子) | |||||||
安装方式 | 地面安装 | |||||||
电柜质量 | 125kg | |||||||
本体质量 | 75kg | 180kg | 245kg | 600kg | ||||
注意
编辑
在计算挠度形变时,梁的自重产生的变形不能忽视,梁的自重按均布载荷计算。
以上公式计算的是静态形变,实际应用中,因为机器人一直处于运动状态,必须计算加速力产生的形变,形变直接影响机器人的运行精度。
2)扭转形变计算:
当一根梁的一端固定,另一端施加一个绕轴扭矩后,将产生扭曲变形。实际应用中产生该形变的原因一般是负载偏心或有绕轴加速旋转的物体存在。
扭转力矩分析图七、八
6、驱动元件选择
常用的驱动系统有:交流/直流伺服电机驱动系统、步进电机驱动系统、直线伺服电机/直线步进电机驱动系统。
每一个驱动系统都由电机和驱动器两部分组成。驱动器的作用是将弱电信号放大,将其加载在驱动电机的强电上,驱动电机。电机则是将电信号转化成精确的速度及角位移。
需要计算的项目如下:
电机功率:
电机扭矩:
电机转速:
减速机减速比
电机惯量/负载惯量的匹配关系
其他计算公式及计算方法请与沈阳力拓公司联系。
7、机械结构设计
在完成了前面六项工作后,一个直角坐标机器人定位系统的雏形就已经在设计者的头脑中形成了,接下来的工作就是将雏形画成工程图,以便生产。我们建议用户用三维软件设计,以便检查是否存在位置干涉。
机器人的运动轨迹具有不确定性,灵活多变,往往在一个位置不存在位置干涉,但到下一个位置就干涉了。
8、设备寿命校核
机械结构设计完成后,要对整台设备进行寿命计算,核心元件的寿命到要计算,如机器人轨道的寿命,减速机的寿命,伺服电机的寿命等。
机器人的运行寿命与运行速度、负载大小、结构形式、工作环境、工作制等有关。
如果发现机器人的运行寿命太短,需要重新调整设计。
具体计算方法请与沈阳力拓公司联系。
9、控制系统的选择
没有控制系统的机器人就象人没有大脑一样,不能执行任何动作。所以我们通常将没有配备控制系统的机械结构称为裸机或机器人定位系统(robot positioning system)。
根据要求的不同,控制系统的选择也不同,通常选择作为控制系统的产品有:
PLC 程序控制器;
工业运动控制卡(motion card);
数字控制系统(CNC)
专业控制器
10、程序编写
控制系统是机器人的大脑,程序是机器人的思想。程序的编写直接反应设计者的思想、意图和运动需求。
编写程序是一个复杂的过程,但只要机器人总体设计没有问题,程序总会编出来的。编程序要注意以下问题:


