ZLAC706 轮毂配套伺服/驱动器机器人专用智能机器人产品定制

深圳中菱科技有限公司
中国 深圳
产品属性
图文详情
品牌推荐
品牌
中菱
型号
轮毂电机
功能
交流伺服
驱动元件类型
机电
控制方式
开环
功率
0.5kw
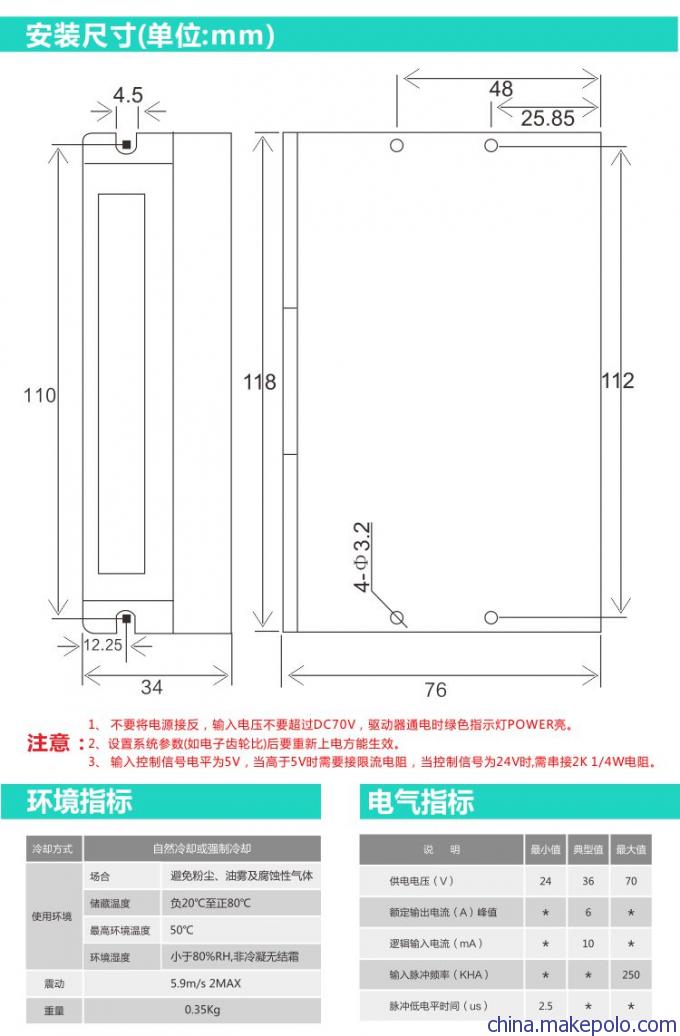
额定电压
24V
产品认证
CE
速度响应频率
250KHz
加工定制
是
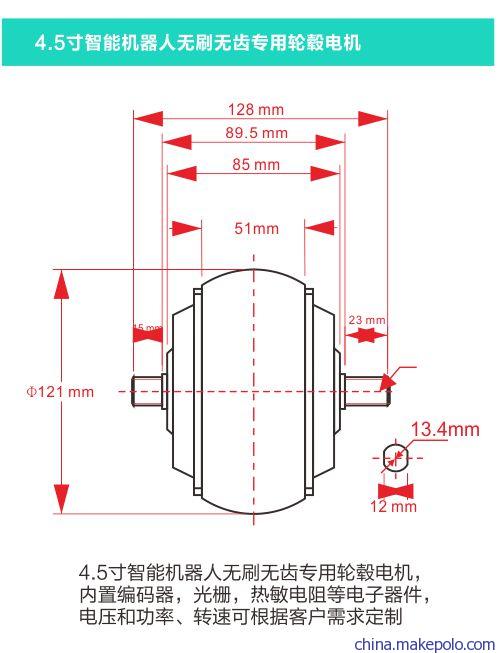
外形尺寸
121mm
重量
2.7kg
转矩
4.5N.m