机器人的制作离不开电机, 新一代轮毂伺服电机驱动器、针对机器人量身打造、取代机器人传统常用普通驱动直流电机,经过全新研发与创新、技术更加成熟稳定可靠。
ZLAC706是中菱科技采用DSP设计生产的矢量控制低成本全闭环全数字交流伺服驱动器。其中包括三个反馈回路:位置回路、速度回路以及电流回路,可以工作在位置,速度和转矩模式,适合驱动电压70V 功率在400W以下的交流伺服电机,该伺服驱动器技术成熟稳定性可靠,相对而言是一款性价比超高的低压伺服驱动器。
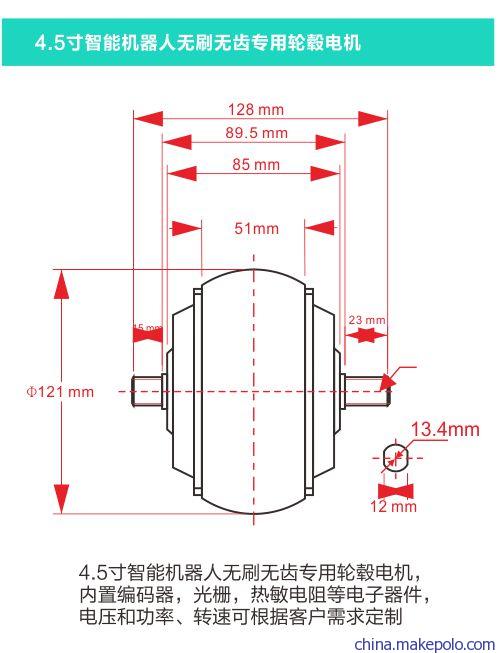
4.5寸智能机器人无刷无齿专用轮毂电机,加外胎直径121毫米 内置编码器、光栅、热敏电阻等电子器件。重量3.00KG 电压和功率/转速可根据客户需求定制 声音小/体积小/寿命长
轮毂电机的结构
轮毂电机驱动系统根据电机的转子形式主要分成两种结构形式:内转子式和外转子式。内转子式轮毂电机采用高速内转子电机,配备固定传动比的减速器,电机的转速通常高达10000r/min。外转子式轮毂电机则采用
低速外转子电机,无减速装置,电机的外转子与车轮的轮辋固定或者集成在一起,车轮的转速与电机相同,电机的最高转速在1000~1500r/min之间,
内转子式的轮毂电机具有比功率较高、质量轻、体积小、噪声小、成本低等优点。其缺点是必须采用减速装置,使效率降低,非簧载质量增大,电机的最高转速受到线圈损耗、摩擦损耗以及变速机构的承受能力等因
素的限制。外转子式轮毂电机的优点是结构简单、轴向尺寸小,能在很宽的速度范围内控制转矩,且响应速度快,没有减速机构,因而效率高。其缺点是要获得较大的转矩,必须增大电机的体积和质量,因而其成本
高。这两种结构在目前的电动汽车中都有应用,但是随着紧凑的行星齿轮变速机构的出现,高速内转子式驱动系统在功率密度方面比低速外转子式更具竞争力。
轮毂电机技术的特点
轮毂电机技术的优点如下:
(1)更方便的底盘布置,更灵活的供电系统
由于采用了电动轮驱动的形式,汽车底盘的布置将更加灵活,省去了机械传动系统之后,使得汽车车厢具有更大的空间,底盘的设计也就具有更大的通用性。同时,电动汽车的电源供电系统也更加灵活,无论是采用
燃料电池、超级电容、蓄电池,或者是它们的组合形式,都将更加灵活而不受限制,动力传动形式也由原来的机械硬连接变为只需要电缆进行供电的软连接形式。、
。
(3)最优的驱动力分配
由于驱动轮(2个或者4个)的驱动力是可以单独调节的,所以通过分析各轮的转矩利用效率,可选择最经济的驱动方式。