Geoslam ZEB-REVO手持移动式激光扫描仪
ZEB-REVO手持式三维激光 是 GeoSLAM公司上一代获奖产品 ZEB1 的升级版,新产品扫描更迅速、功能更多样、操作更简便。系统核心为GeoSLAM开发的技术领先的三维数据处理算法,该算法可在不需要控制点的条件下,快速扫描多区域空间。ZEB-REVO的可移动性及其独有的数据算法,广泛适用于多种测量环境,与传统技术相比,极大的提升了复杂条件下的扫描效率。
特点
l
移动:全套设备仅3.5kg,可移动的快速扫描多区域环境;
l
坚固:IP64防护等级,可在各种环境下工作;
l
易用:不需要GPS或其它控制点,一键启动即可完成扫描;
l
快速:几分钟内即可完成动态扫描,远快于传统激光扫描仪;
工作原理
第一步 扫描:使用手持式可移动扫描仪 SCRREVO,可以快速的对多区域空间进行360°全景扫描,100Hz的激光扫描率可以快速准确的获得高质量的三维空间扫描数据。
第二部 软件: 全自动 SLAM(Simultaneous
Localisation And Mapping)系统,提供单机处理软件和云数据处理,可选择购买软件或数据处理服务,进一步降低数据处理难度。
第三部 数据:生成压缩处理的 .laz 格式的三维点云数据,亦可生成未压缩的 .las 格式,包含扫描运行轨迹等原始数据;文件格式兼容大部分第三方软件。
应用
ZEB-REVO 是 GeoSLAM公司上一代获奖产品 ZEB1 的升级版,新产品扫描更迅速、功能更多样、操作更简便。系统核心为GeoSLAM开发的技术领先的三维数据处理算法,该算法可在不需要控制点的条件下,快速扫描多区域空间。ZEB-REVO的可移动性及其独有的数据算法,广泛适用于多种测量环境,与传统技术相比,极大的提升了复杂条件下的扫描效率。
产品升级
l
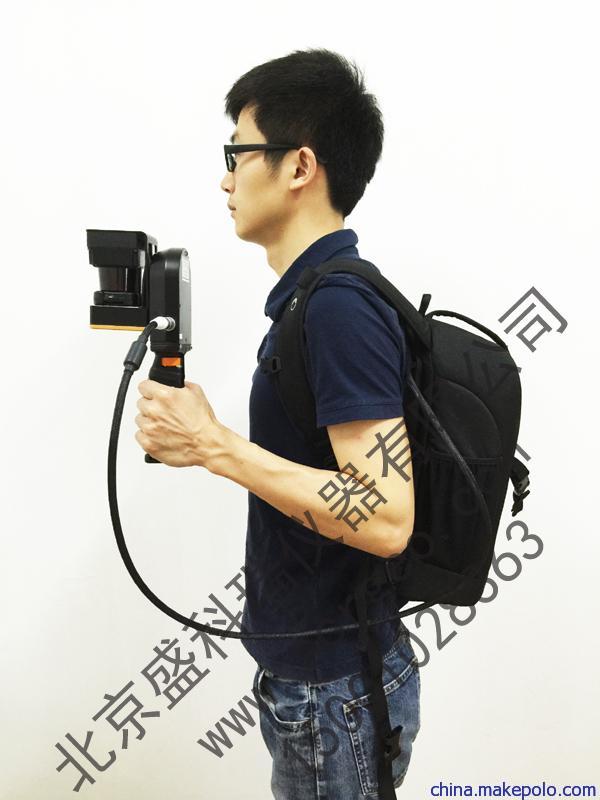
多功能:ZEB-REVO升级了自动扫描探头,使动态扫描更加便捷,支持手持、固定杆、背负、车载等多种方式。
l
高精度:ZEB-REVO使用100Hz的激光扫描频率,精度较ZEB1提升2.5倍,获得更加精确的点云数据。
l
更小巧:产品更加轻便小巧,不用手动摆动扫描探头,扫描操作更加轻松。
l
更准确:更高的扫描精度使得单次扫描就能获取更详细的点云数据,提升三维数据处理的效率和准确性。
系统参数
系统参数 *被测表面激光反射率>90%时,室内最大测距为30m 室外测量时根据环境不同,最大测距可达20m | 测量距离 | 30m* |
数 采 率 | 43200 pt/sec |
分 辨 率 | 水平 0.625° 垂直 1.8° |
测量范围 | 270°×360° |
距离精度 | 2cm |
电压 | DC 12V |
电流 | 1.0-1.5A |
功率 | <20W |
工作温度 | 0℃~50℃ |
工作湿度 | <85% |
激光探头 | 激光等级 | 1级(对人眼无害) |
波 长 | 905m |
频 率 | 100Hz |
周转频率 | 0.5Hz |
电 池 | 电池类型 | 锂聚合电池 |
容 量 | 8Ah ±5% |
电 压 | DC 12V |
可用时长 | 4h(不间断使用) |
充电时间 | 8h |
电池寿命 | 300+ 充电循坏 |
重 量 | 600g |
数 据 | 存储容量 | 55GB |
原始数据 | 10mb/min |
压缩数据 | 8mb/min |
数据格式 | .LAZ or .LAS |
兼 容 性 | .LAS 兼容大部分第三方系统,例如CAD等 |
设备参数 | 防护等级 | IP64 |
数 据 线 | LEMO multi pin |
探头重量 | 1kg |
设备总重 | 3.5kg |
探头尺寸 | 86×113×287mm |
设 备 箱 | 220×180×470mm |
影响因素
以下一些因素可能会影响扫描结果:
l
极度光滑的表面
l
移动的物体
l
无明显特征空间
l
(户外测量时)降雨
l
扫描循环未闭合
在更好的空间条件下,扫描精度可高于一般系统精度(即2cm)。
应用案例:
某矿扫描:
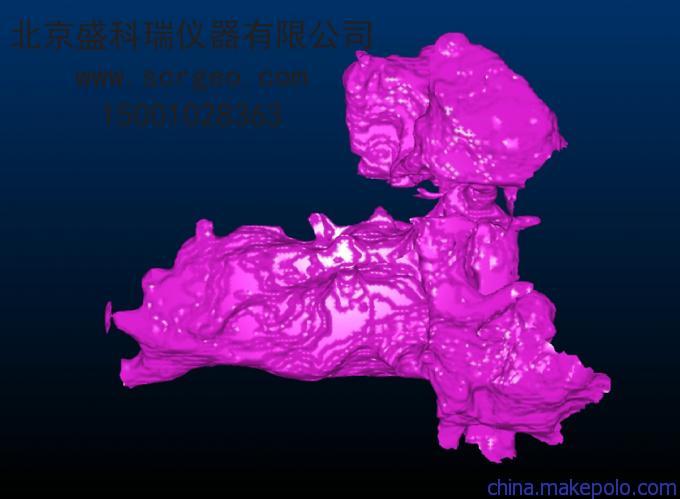

北京盛科瑞仪器有限公司为geoslam公司在中国矿山市场的独家代理。
请联系北京盛科瑞仪器有限公司,010-68785620/68785920;
小吴:010-15001028363






