FO-SLS-21 激光雷达传感器——产品介绍
FO-SLS-21是一款扫描式电光激光测量传感器, 发射的激光束使用固定在旋转电机上的反射镜反射偏转并以固定频率扫描周围环境。扫描范围为270°的二维扇形区域,扫描的最大距离由产品具体型号确定。
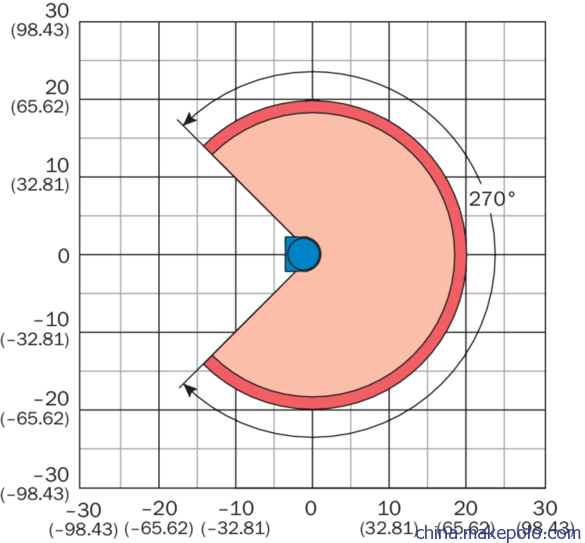
图1 FO-SLS-21激光测量传感器的扫描区域
FO-SLS-21激光测量传感器通过激光二极管发射激光脉冲,经过相关处理后变为高斯分布的圆光斑,并以一定的发射角出射。一个脉冲遇到目标物体或人时会被反射,反射光通过光电二极管探测,目标的距离是根据光线从发射到接收传感器所需要的传播时间来计算。光束出射直径为8mm,随着探测距离的增大,下图显示了光斑束发散的过程:
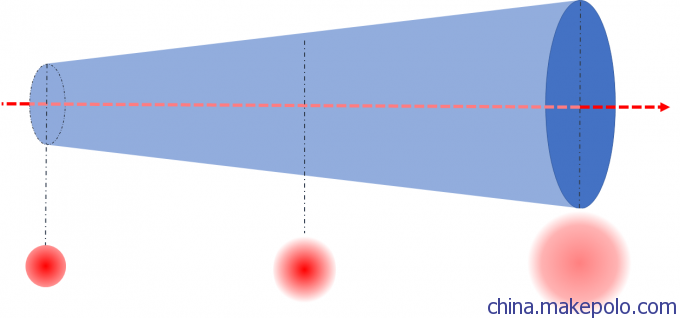
图2 激光脉冲出射发散
光斑直径D与探测距离U的关系为:
D=8mm+0.013RAD*U(mm)
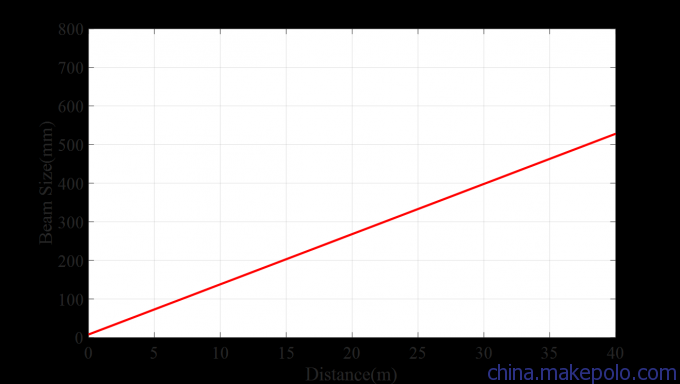
图3 激光脉冲在不同探测距离处的光束直径
为了可靠地检测物体,激光束必须完整地入射到物体表面,即待测物必须大于激光的覆盖区域,因为部分入射物体会使反射的能量少于某些环境所需的能量。随着出射激光传输的距离越来越远,单个脉冲可测量点的个体之间的距离越远。 测量点之间的距离也取决于配置的角度分辨率。 角分辨率越大,测量点之间的距离越大;角分辨率越精细,测量点之间的距离较小。为了保证扫描区域不发生间断,需要足够数量的激光脉冲保证角分辨率。下面提供了一种可能的方案支持可定制的角分辨率:激光重复频率为36KHz,如果旋转电机频率为50Hz,那么每对周围完成一次二维平面扫描便有720个激光脉冲,得到的0.5°的角分辨足以完成对既定区域内的所有目标的扫描。
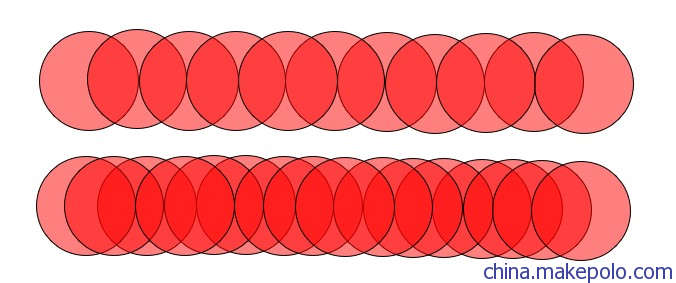
图4 0.5°与0.25°角分辨脉冲交叠对比
FO-SLS-21 激光雷达传感器——产品参数
参数 | FO-SLS-21 |
距离 | 0.1-20m |
响应时间 | ≥20ms |
角分辨率 | 0.5° |
输出分辨率 | 1.0mm |
接口 | Ethernet |
工作温度 | -30°~50° |
雷达模块 电源电压 | DC 12-30V |
功耗 (加热模块关闭) | < 8.4W |
加热模块 电源电压 | 24V±20% |
加热模块功耗 | < 50W |
可编程警戒区域 | 1 |
警戒区支持形状 | 圆形、凸多五边形 |
产品特点:测量精准、信噪比高、强抗干扰、恶劣环境
应用领域:智能物流、安全防护、区域警戒、AGV导航、公路交通

