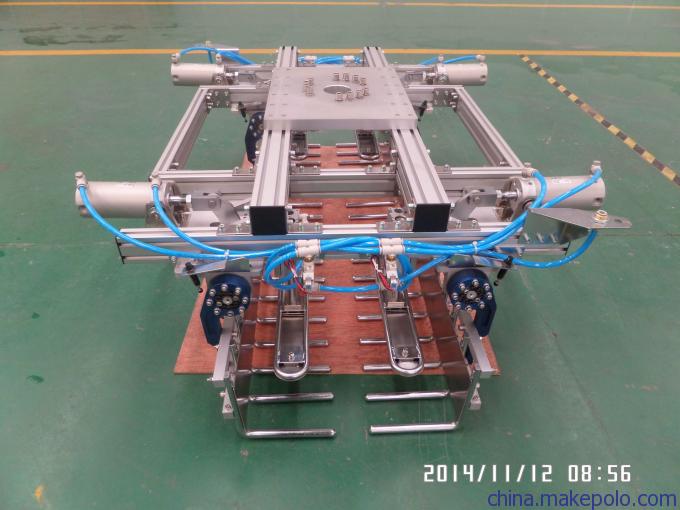
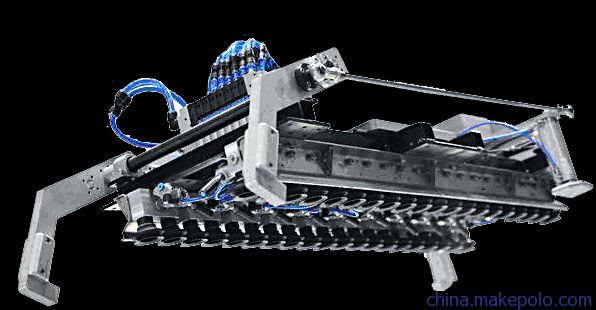
名称: 抓取式抓手
型号:ZKYT-RZ-50K系列
最大提举重量:50kg
抓手自重:50kg
抓取数量: 1件
主要应用:广泛用于各类软袋包装物的码垛,如袋装化肥,饲料,粮食,化工原料等。
功能特点:高速码袋
适合不同尺寸包装袋
装有压袋机构,防止甩包
配备全套管线,即插即用
名称: 双板式抓手
型号:ZKYT-RBS-60K系列
最大提举重量:60kg
抓手自重:80kg
抓取数量: 1~5件
主要应用:以重型单箱或者多箱码垛为应用目标,可广泛应用于各类箱体的码垛,如纸箱,周转箱等。
功能特点:轻量化设计,结构精简,
配备弯钩机构,在高速运动过程中确保抓牢箱盒
夹持范围宽大,适合不同尺寸箱盒,特殊尺寸箱盒可个性化定制
配备全套管线,即插即用
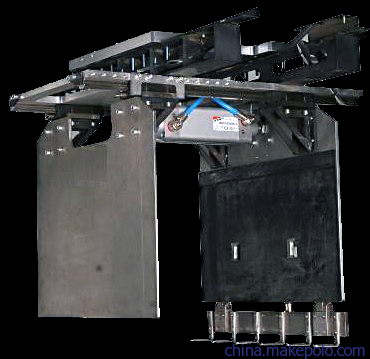
名称: 单板式抓手
型号:ZKYT-RB-40K系列
最大提举重量:40kg
抓手自重:45kg
抓取数量: 1件
主要应用:以重型单箱码垛为应用目标,可广泛应用于各类箱体的码垛,如纸箱,周转箱等。
功能特点:轻量化设计,结构精简,
弯钩机构确保在高速运动过程中抓牢箱盒
夹持范围宽大,适合不同尺寸箱盒,特殊尺寸箱盒可个性化定制
配备全套管线,即插即用
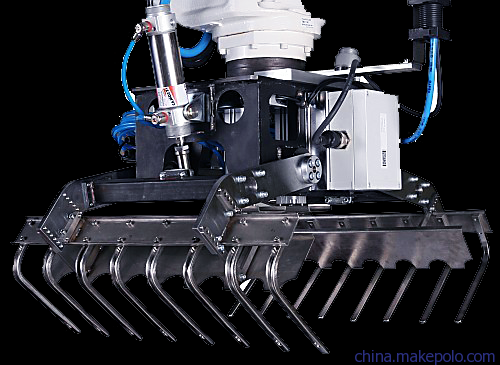
名称: 真空吸取式抓手
型号:ZKYT-RX-40K系列
最大提举重量:40kg
抓手自重:75kg
抓取数量: 1~5件
主要应用:主要应用于表面细致光滑、结构稳定牢固的产品,如方便面纸板箱,啤酒箱等。
功能特点:多达10个独立可控真空区
通过传感器检测箱盒是否在位
可调节真空导轨,适应不同尺寸箱盒
可选配托盘抓取机构
配备全套管线,即插即用
鉴于码垛产品的尺寸、重量、表面情况、刚度、重心等参数各异,为确保码垛生产线发挥正常功能,订货前请交付工程技术部样品进行试验。
、
名称: 复合式抓手(袋子和箱子兼用)
型号:ZKYT-RZ-50K系列
最大提举重量:50kg
抓手自重:60kg
抓取数量: 1件
主要应用:广泛用于各类纸袋,编织袋以及纸箱包装物的码垛,如袋装化肥,饲料,粮食,化工原料外加纸箱等。
功能特点:高速码袋;使用与码垛和拆垛,2者通用
适合不同尺寸包装袋和纸箱
装有压袋机构,防止甩包
配备全套管线,即插即用