一、概述 IG60是一款为智能扫地机器人定制的惯性导航模块,内置高精度陀螺仪,高性能嵌入式系统。模块内嵌SLAM算法,配合艾豆智能SDK使用,通过融合陀螺仪数据,可获取航向角(yaw),机身坐标(X,Y)等数据,清扫区域、未清扫区域、障碍物点、轻松快速实现陀螺仪室内导航定位、生成地图、弓字清扫、沿边清扫等功能。系统支持3.7~5.5V电压,具有功耗小,体积小等优点。
二、产品特点1. 体积小。2. 低功耗3. 低温漂4. 高精度,浮点型输出,精度高达0.0001°。5. SPI通信,角度响应频率高达500HZ。6. 内置SLAM算法,实现室内建图定位功能。7. 输出信息包括航向角、XY坐标等地图信息。8.实 8.时存储地图、输出清扫区域、未清扫区域、障碍物区域等信息。
三、技术参数名称 | 参数 |
角度测量范围 | 0°~360° |
分辨率 | 0.0001° |
角度响应频率 | 500 HZ |
工作电压 | 3.7V~5.5V |
工作电流 | 22mA |
接口 | SPI |
工作温度 | -20° ~ 85° |
存储温度 | -40° ~ 85° |
四、
产品应用1. 智能扫地机器人
2. 手持仪器仪表
3. 航天航模系统
4. 平衡车
5. 天线俯仰定位
五、
地图输出配合艾豆智能IG60模块SDK,可实时输出如下地图信息:
名称 | 说明 |
航向角 | 水平面角度,范围0°~360度 |
机身X坐标 | 坐标系内的X轴坐标。 |
机身Y坐标 | 坐标系内的Y轴坐标。 |
清扫区域 | 存储输出地图中所有清扫点的坐标 |
未清扫区域 | 存储输出地图中所有未清扫点的坐标 |
障碍物坐标 | 存储输出地图中障碍物的坐标 |
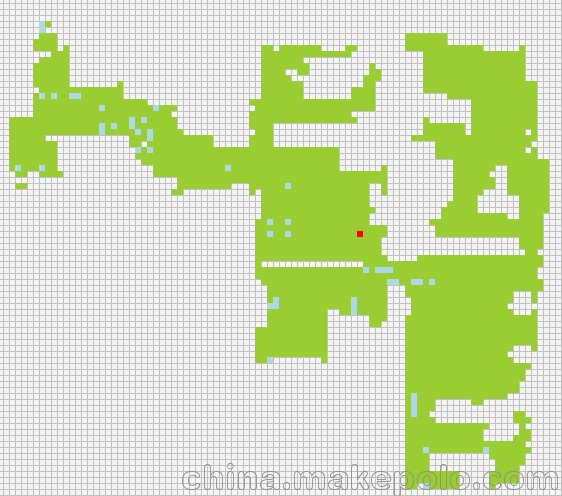
SDK实时存储清扫区域,清扫点的坐标如下图所示(绿色为清扫点):
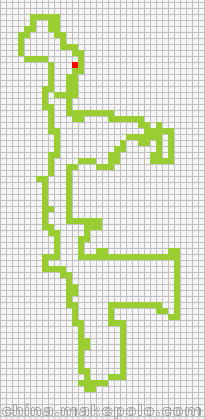
模块在运动过程中建立坐标系,实时扫描、定位、建图。下图是智能扫地机器人沿边清扫时实时扫描建立地图、显示路径的例程: