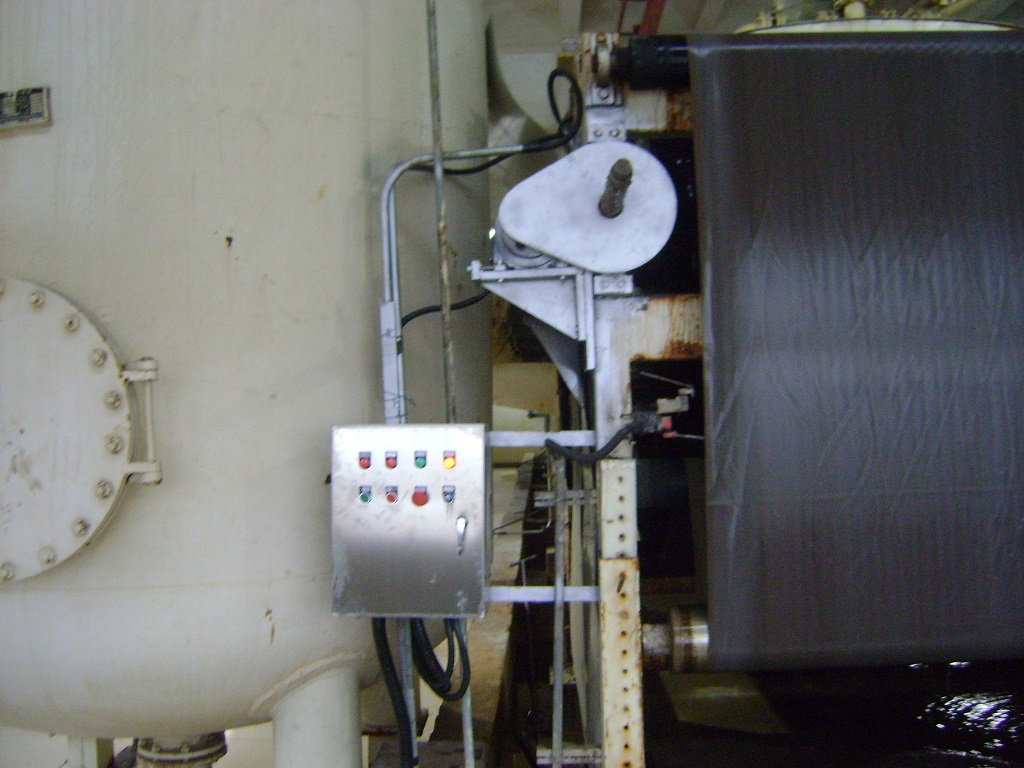
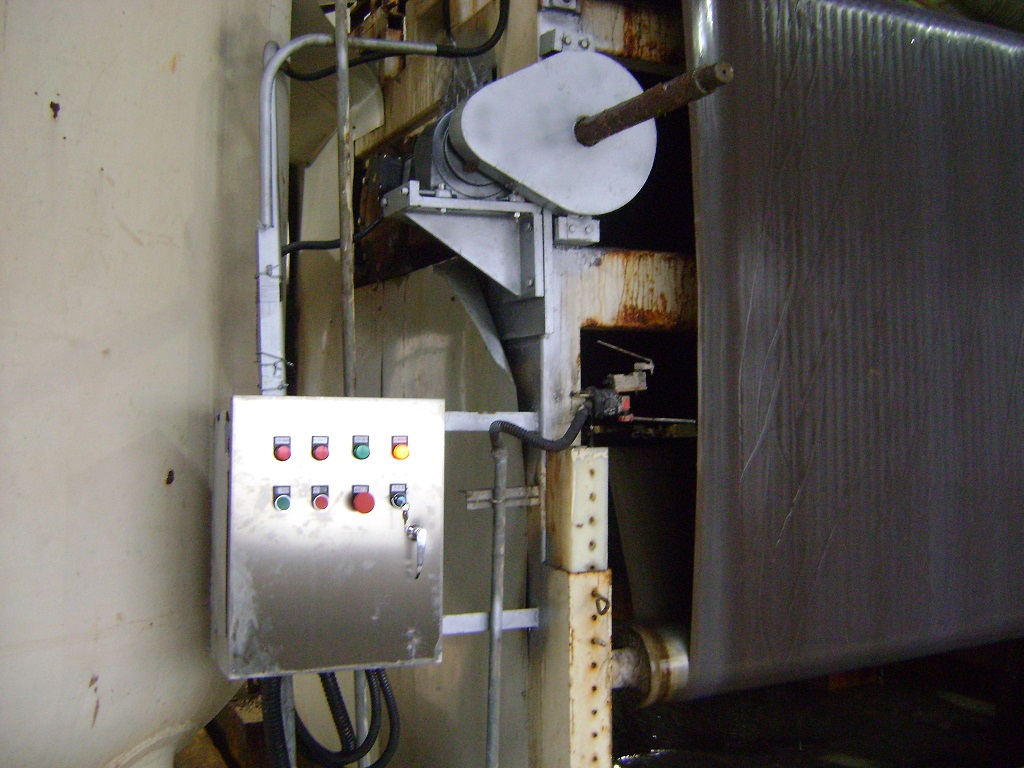
真空皮带机皮带自动纠偏装置,皮带自动纠偏

昆山共邦工程装备有限公司
中国 苏州
产品属性
图文详情
品牌推荐
品牌
GB
型号
GBJP55/160
型式
真空式
接触物料部分的材质
316L
过滤速率
100t/h
额定压力
-0.07MPa
过滤面积
100m2
滤带宽度
5000mm
加工定制
加工定制
性能
连续运作
驱动
电机
功率
1.1KW
占地
100*110*100mm
供货期
10天
适用范围
胶带宽带大机型