武汉冲压机械手:
武汉冲压机械手定义为横向来回移动轴,横向行程的大小依赖于注塑机专用机械手是在注塑机侧边还是在后边将部件放下。利用这轴行程把产品从注塑机模具内取出后,横向移动到安全门外的指定区域。

武汉冲压机械手冲床机械手行走的距离就是为人熟知的行程,它的大小与部件尺寸、下降位置和注塑机形状有关系。为了简便,这个距离通常按三轴定义:X、Y和Z轴。请注意并不是所有的注塑机专用机械手制造商都是以这种方式来定义行程。一些定义轴的方法不同,而另一些采用了不同的命名习惯。
机械手定义为前后行程,其大小和部件厚度有关。例如为了取出一只水桶,注塑机专用机械手要伸入模具,并把桶子从模具中取出,就需要足够的行程。
Z轴
专用机械手定义为垂直上下行程,是安装在注塑机上,下降取产品高度所决定的。也就是说,注塑机专用机械手必须足够的高,以便从注塑机模具内能把部件取出,又能从注塑机的安全门上把产品顺利横向移出,能在注塑机外离地面合理的高度上放下部件。
Y轴
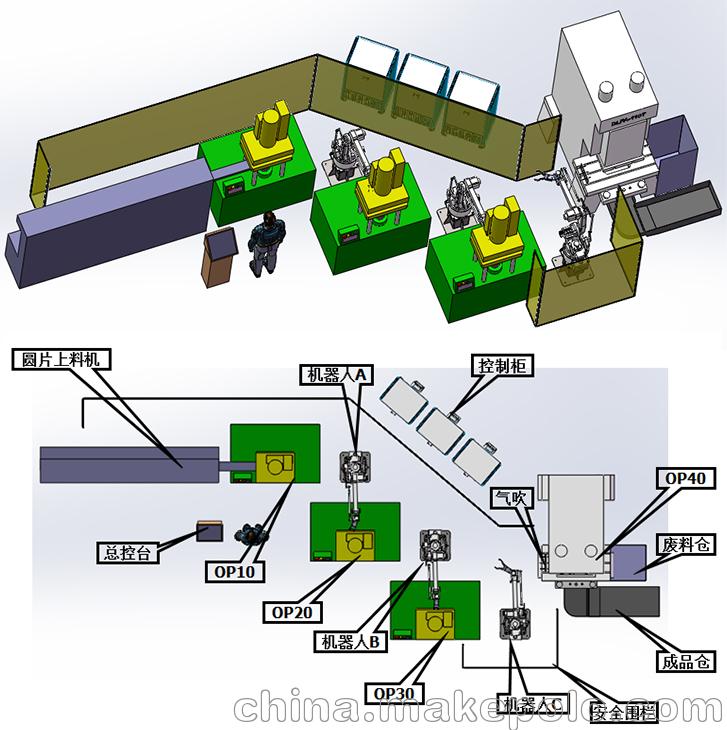
冲床机械手的确定所需行程的最简易方法是画出布局图。武汉冲压机械手布局不仅确定出每一个行程,武汉冲压机械手并且在平面规划图上确定出重要的事项,例如周边辅助设备、支撑柱和空隙区等。

佛山,武汉冲压机械手HC1400冲压机器人参数
型号
| Hc1400 |
轴臂长 | 第1+2轴臂长 | 1400MM |
1臂 | 700MM |
2臂 | 700MM |
最大负载 | 10KG |
最大运动速度 | 第1关节 | 120°/S |
第2关节 | 138°/S |
第3关节 | 150°/S |
第4关节 | 150°/S |
循环时间 | 2.8S |
本体重量 | 140KG |
重复定位精度 | 第1+2关节 | ±0.08mm |
3关节 | ±0.08mm |
4关节 | ±0.05° |
运动最大范围 | 第1关节 | ±170° |
第2关节 | 正10°,负125° |
第3关节 | 正10°,负95° |
第4关节 | ±360° |
电机功耗 | 第1关节 | 1500w |
第2关节 | 1000w |
第3关节 | 750w |
第4关节 | 400w |






