主要用途:装配、上胶、密封、机械管理、物料搬运
六关节机器人IRB1410的特点:
1.可靠性:坚固且耐用-IRB1410以其坚固可靠的结构而著称,而因此带来的其它优势是噪音水平低、例行维护间隔时间长、使用寿命长.
2.准确性:稳定可靠-卓越的控制水平循精度(±0.05mm)确保了出色的工作质量.
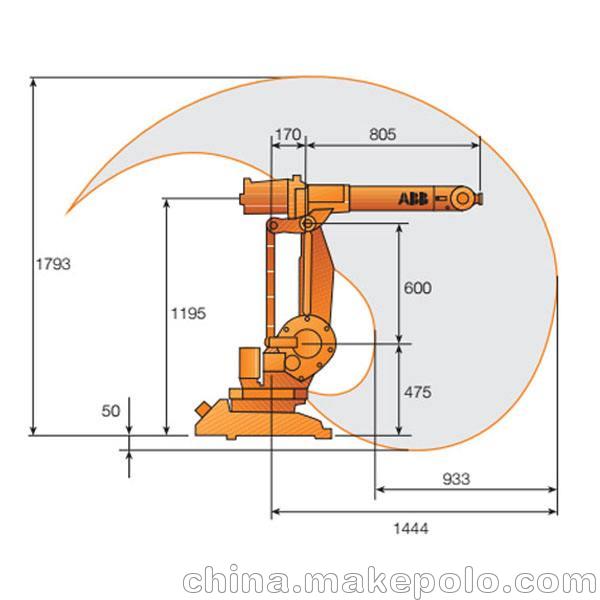
3.坚固:及时应用-该机器人工作范围大,到达距离长,(最长1.44).承重能力为5KG,上臂可承受18KG得附加载荷.这在同类机器人中绝无仅有.
4.高速:较短的工作周期-机器人本体坚固,配备快速精准的IRC5控制器,可有效缩短工作周期,提高生产率.
5.弧焊:集成-在机器人手臂上的送丝机构,配合IRC5使用的弧焊功能以及专利的单店
您对此产品的咨询信息已成功发送给相应的供应商,请注意接听供应商电话。
对不起,您对此产品的咨询信息发送失败,请稍后重新发起咨询。