
1 方案概述“InteRobot 理实一体化教室”是深圳加瑞尔机器人有限公司为配合、支持国家提出的大力推进教育改革创新,全面提高办学质量,满足工业机器人教学环境,开发出的新产品。该方案该包括工业机器人实体操作站(模拟机床上下料实训、码垛实训 、喷涂实训等)和工业机器人虚拟操作站(工业机器人运用虚拟仿真、工业机器人运用离线编程、工业机器人装调 与维修虚拟仿真)。是专门配合各类工科院校进行工业机器人运用教育的教学和实训环境,旨在帮助各院校培养符合现代制造业需要的高级技能型职业技术人才。“InteRobot 理实一体化教室”利用网络技术帮助学校建立理实一体化的教学教学,将理论学习和实践学习合而为一,
加强教学过程中的体验感和互动感,全程构建素质和技能培养构架,从而实现理论、实践一 体化,教、学、做一体化;时间、地点、内容、教师一体化;理论、实践紧密结合,相互支 持,相互促进,为教学过程最优化提供了保障。
 2 可开展的教学课程
2 可开展的教学课程
l 工业机器人基本操作教学
l 工业机器人示教教学
l TCP 标定教学
l 建立工件坐标系教学
l 简单轨迹、连续轨迹和空间复杂轨迹示教教学
l 工业机器人基本指令操作与位置点设置
l 工业机器人模拟机加上下料工装实训综合应用
l 工业机器人码垛实训综合应用
l 工业机器人离线编程(写字)实训综合应用
l 工业机器人模拟喷涂实训综合应用
l 工业机器人运用虚拟仿真
l 工业机器人离线编程
l 教师端学生端进行数据交互
3.1 三维图及说明
 | |
方案布局
3.2 方案原理说明
方案说明
4 理实一体化教学系统软件
4.1 机器人运用虚拟仿真
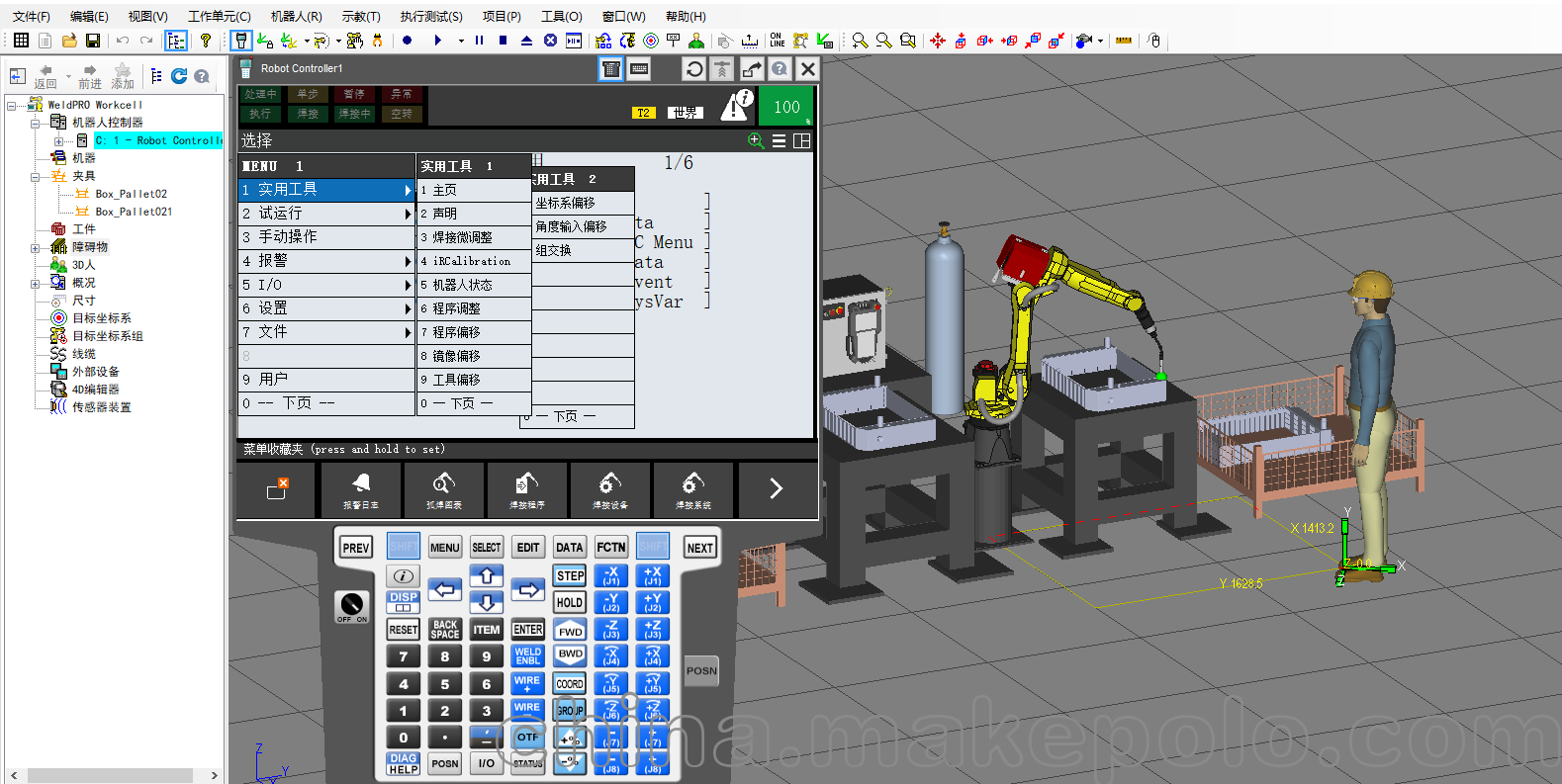
“InteRobot 理实一体化教学系统软件”在理实一体化教学系统平台 PC 上运行后,可以添加与实际机器人一样的工作场景,可实现多品牌机器人的机器人进行虚拟仿真。理实一体化教学系统平台如图所示
实训工艺流程:按照操作指导书,通过“InteRobot 理实一体化教学系统软件”,在 PC
上进行虚拟仿真。

工 业机器人离线编程
4.3 理实一体化教师机
4.3.1 设备三维图
设备名称 | 设备组成及功能参数 | |||
InteRobot 理实一体化教学系统 (教师机) |
总参数 | 额定功率 | 220W | |
额定电压 | 220V | |||
最大控制轴数 | 8 | |||
控制模式 | 自动模式、手动模式 | |||
适用环境 | 温度 | -20°~45° | ||
湿度 | 20%~80% | |||
其他 | 避免与易燃易爆或腐蚀性气体、液体接 触,远离电子噪声源(等离子) | |||
安装方式 | 地面安装 | |||
产品重量 | 50kg | |||
外观尺寸 | 长 800*宽 605*高 1000mm; | |||
|
InteRobot 软件 | 1. ▲具备通用离线编程软件的编程和仿真能力。能够进行机器 人和工具配置、路径编程与优化、三维运动仿真与干涉检查 以及后置机器人程序等功能。 2. ★实现 PC 机、控制系统、示教器数据接口无缝集成。能够在 PC 机仿真软件上控制示教器和控制系统,也可以在示教器上控制控制系统和 PC 的仿真软件。 3. ▲可以实现 PC 机上的虚拟机器人位置和姿态与控制系统上的实时数据完全同步,完全模拟出真实机器人的运行状态。 4. ▲可以通过 PC 机上的虚拟机器人同步并修改控制系统上的软限位、IO、工件、工件、基坐标等参数,显示结果与示教 器上完全一致。 5. ▲可以检查和显示机器人控制系统发出的控制信息:TCP 和各关节的位置、速度、加速度; 6. ▲可模拟工业机器人的示教/再现过程,通过真实的机器人手持盒编辑工业机器人的程序并动态模拟工业机器人的运动过 程,观察工业机器人的运动结果,检验所编写工业机器人程 序的正确性; | |
主机 |
基本参数 |
l 产品类型: 商用电脑 纠错 l 操作系统: (64 位 简体中 l 主板芯片组:Intel B250 | |
处理器 | l CPU 系列:英特尔 酷睿 i7 7 代系列 l CPU 型号:Intel 酷睿 i7 7700 l CPU 频率:3.6GHz l 最高睿频:4.2GHz l 总线规格:DmI3 8GT/s l 缓存:L3 8MB l 核心构架:Kaby Lake l 核心/线程数:四核心/八线程 l 制程工艺:14mm l 商用技术:Intel 博锐技术 | ||
储存设备 | l 内存类型:DDR4 l 硬盘容量:1TB l 硬盘描述:7200 转 l 光驱类型:DVD | ||
显卡/ 声卡 |
l 显卡类型:独立显卡DirectX DirectX12 | ||
网络通信 |
l 有线网卡 支持蓝牙功能 | ||
I/O 接口 |
l 数据接口:2xUSB2.0,6xUSB3.0 l 音频接口:耳机输出接口,麦克风输入接口 l 网络接口:RJ45(网络接口),PS/2 l 其他接口:电源接口 | ||
|
|
|
l 电源:180W 电源适配器 | |
其他 | l 机箱类型:立式 | |||
参数 | l 机箱颜色:黑丝 | |||
| l 键鼠特性:有线鼠标,有线键盘 | |||
| 1. | 完全工业用机器人控制器,最多可同时控制 8 根轴; | ||
| 2. | 全部使用工业级控制芯片及成熟的控制电路,确保硬件系统 | ||
|
| 的安全可靠; | ||
| 3. | 使用实时控制系统及重要数据的多重保护技术,确保软件系 | ||
|
| 统的安全可靠; | ||
控制器 | 4. | 实现机器人末端位置、姿态的计算及运动控制; | ||
| 5. | 实现机器人空间轨迹规划及控制; | ||
| 6. | 实现机器人端部的自动加减速约束控制; | ||
| 7. | 引入 EtherCAT 总线传输协议,实现了数据的安全、实时传 | ||
|
| 输,确保系统的安全、稳定; | ||
| 8. | 供电要求:DC24V。 | ||
| 1. | 全部使用工业级控制芯片及成熟的控制电路,确保硬件系统 | ||
|
| 的安全可靠; | ||
示教器 | 2. 3. | 能够编辑机器人运动程序,并检查程序的正确性; 能够显示机器人的参数以及机器人状态; | ||
| 4. | 能够在示教器上升级机器人控制系统程序; | ||
| 5. | 能够标定机器人工具坐标系、工件坐标系。 | ||
|
1. |
★理实一体化教学系统可以模拟出所有机器人的应用场景, | ||
产品亮点 |
| 如上下料、五金打磨、位于喷涂、焊接加工等,并可在这些 | ||
|
| 场景中进行离线或在线编程与仿真。 | ||




