浅水声呐组成:
浅水声呐多频宽条带系统主要由传感器单元(含有两个声呐发送传感器、六个侧向接接收器及一个正下方接收器,并含有水下电子处理装置)、安装支架和一台笔记本工作站以及相应的勘测与后处理软件组成。需要一台RTK-GPS、一台高精度三维运动传感器及一台高精度罗径(通常推荐 GPS罗径或光纤罗径)配合使用。系统采用干涉测量技术,即以测量相位差的方法确定目标位置,以极高地效率获取近乎完美的水下地形数据。它在浅水,特别是内陆河湖的水底地形的勘测中,具有其它测量设备不可比拟的优势。
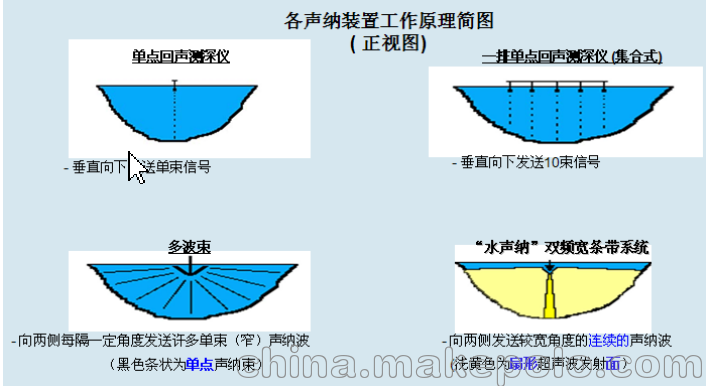
基本工作原理:
通过计算自声呐发送器向水底发射超声波至声呐接收器接收到从水底目标物反射回来的超声波的时间差,来确定水下目标物的位置。
浅水声呐技术特点:
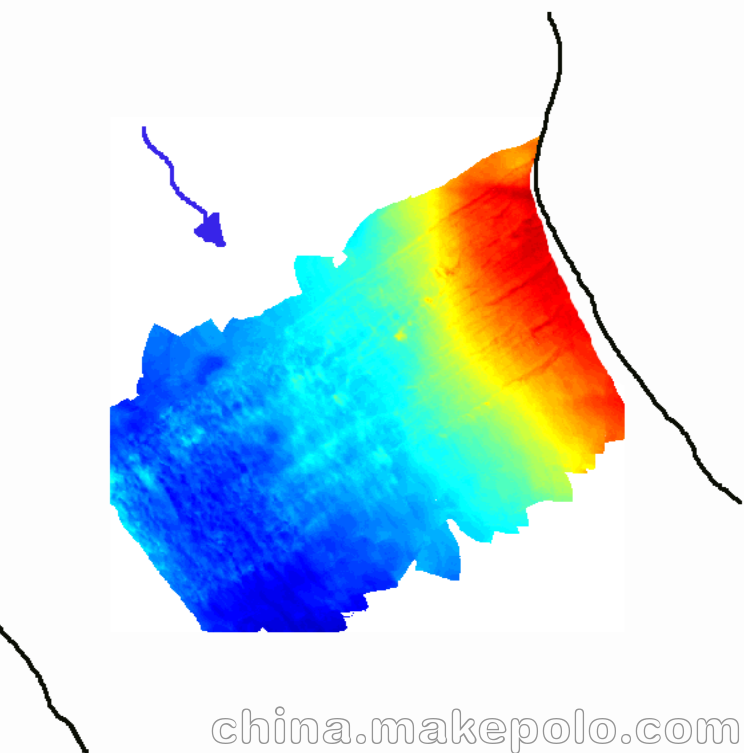
高分辨率和勘测精度
数据收集范围宽,勘测效率高。在超浅水域的测幅十分高效
多频设计
对于水下复杂地形的适应性好
设有防撞装置
传感器夹角可调
背景地图与勘测规划图导入功能
数据抗干扰能力强
即时水下地形显示功能,方便勘测者操作
结构简单、操作与后处理容易
传感器单元
发送频率: 98kHz 至 156kHz, 19 级可调
传感器个数: 共九个,一边一个发送器.一边三个接收器.一个垂直向下的接受器
极限水深:100 米
浅水测量水深:1米
极限测量轨迹宽度:300 米
测量距离: 2×15, 2×30, 2×35, 2×50, 2×70, 或 2×100 米的模式可供选择。
脉冲循环周期 48Hz (极限距离 15 米) 24Hz(极限距离 30 米) 15Hz (极限距离 50 米) 10Hz (极限距离 70 米) 8Hz (极限距离 100 米)
脉冲长度:可在32 至160 毫秒之间选择垂直于航行方向上的分辨率: 5厘米(平均)
测量航速: 1 - 4 米/秒
电子处理装置: 全部内置于传感器内
电源要求: 12 -24伏直流
传感器夹角可调: ~13°- ~ 35°
上下运动机械的行程:55厘米,电控。
信号传输: Firewire 400/800 火线数据连接。
传感器块: 高 30 厘米,长50厘米,重19千克。安装支架重14千克
工作站:
膝上电脑:苹果 MacIntosh MacBook Pro 2.4GHz Intel Core 2 Duo SuperDrive
处理器:因特尔芯 2 Duo, Intel Core i5, Intel Core i7
内存:4Gb 硬盘:230 Gb
总线速度:800 MHz
操作系统: Mac OS X Version 10.5~10.9
显示器:14”或 17"宽屏液晶显示器
信号传输:
传感器单元输出信号由 Firewire400/800 火线电缆传输 - 其它附属装置信号由 USB 接口输入
详细案例咨询请联系我们!