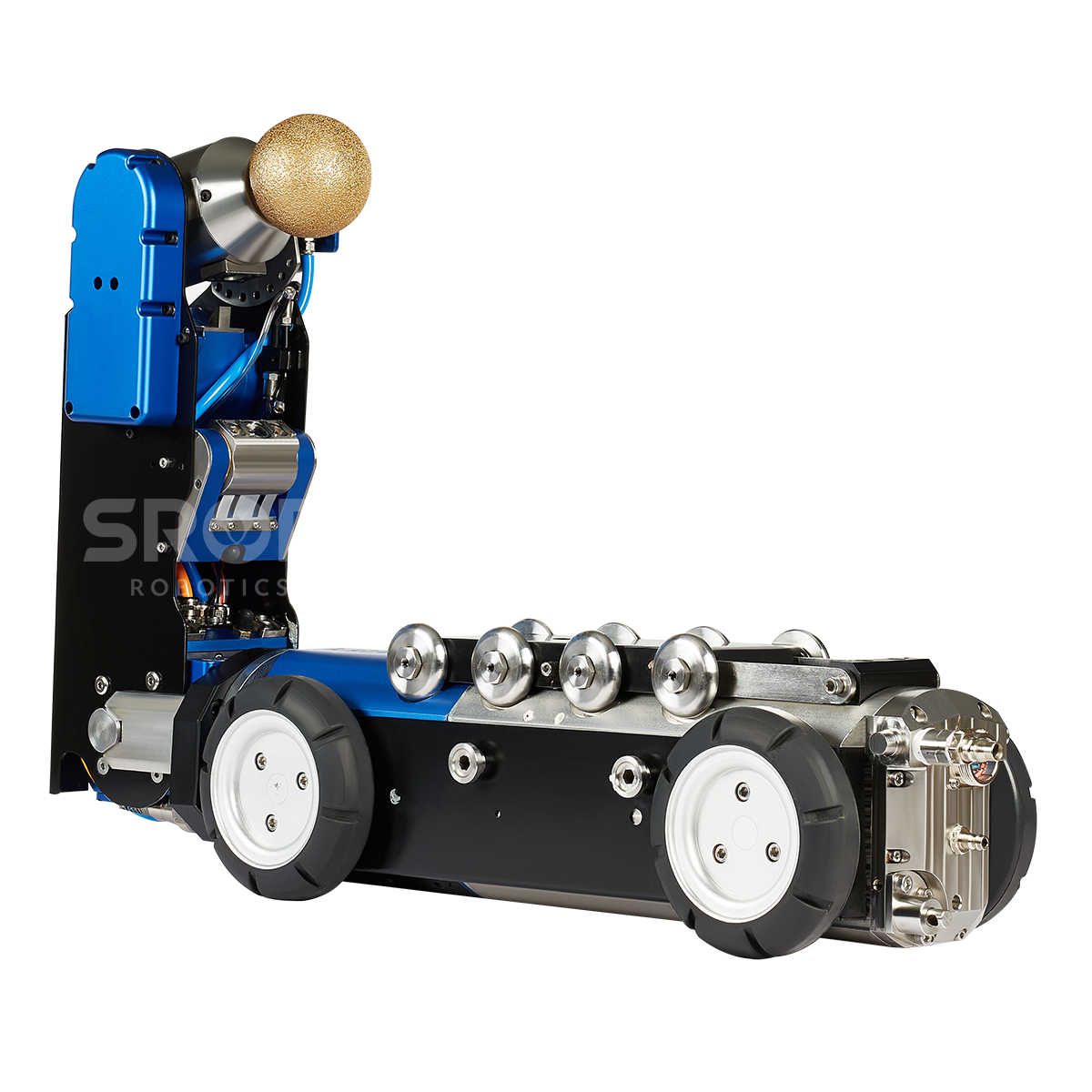
施罗德管道切割机器人,管道修复专家

河南省畅视仪器设备有限公司
中国 郑州
产品属性
图文详情
品牌推荐
品牌
施罗德
型号
Turbo
用途
检测机器人
控制方式
固定程序控制机器人
驱动方式
电动式
安装方式
地面位移小车
操作机坐标形式
平面关节型工业机器人
加工定制
非加工定制
自由度数
180°
负载能力
50kg
重复定位精度
100mm
可达半径
100mm
工作速度
0.15m/s
外形尺寸
820 x 670 x 1030mm
重量
130kg
适用管径
DN200-800管道
防水等级
IP67
照明
2 x 10W卤素灯
收线方式
2 x 10W卤素灯
线缆长度
100m