关键词:四关节机器人、给汤机器人、舀汤机器人、机器人給汤机、压铸给汤机器人、搬运机器人、工业机器人
CTFR-460采用四关节结构架构的給汤机器人系统,末端关节始终保持水平状态,可通过软件系统灵活配置給汤操作模式,并具有结构简单、成本低廉、可靠性高等特点。
视频资料请参考这里:给汤机器人现场工作视频http://www.csumtech.cn/VideoShow.aspx?tid=85&cid=322&sid=408&id=329
1. 机械结构说明:
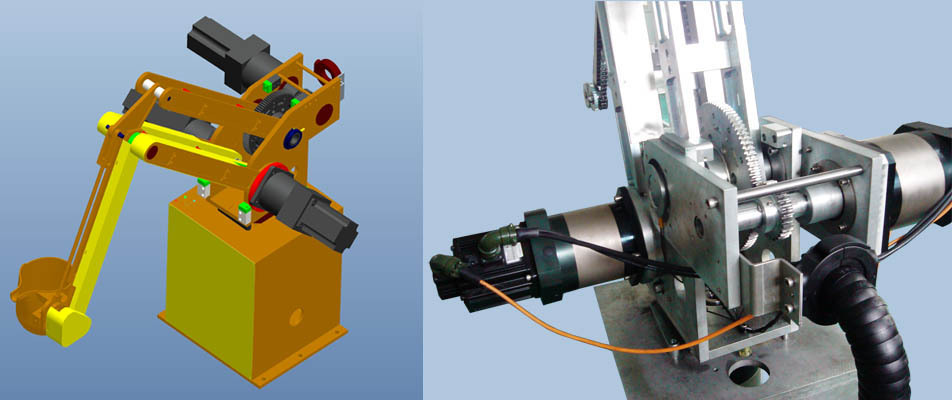
1).腰式机座结构,使得整个机器人站立很稳固平稳,便于旋转,移动。
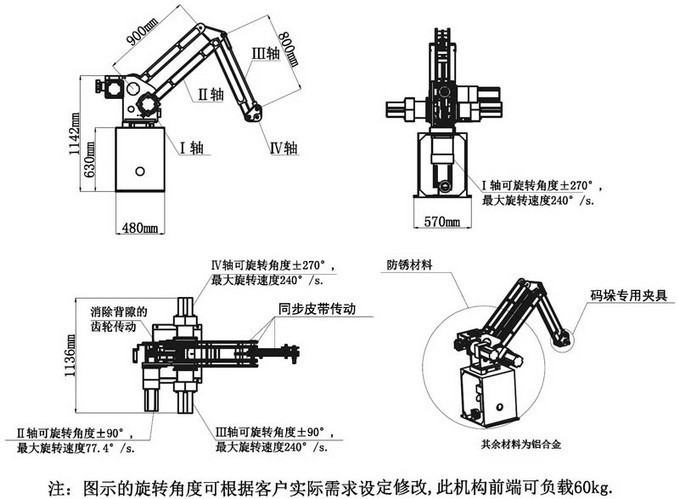
2).手臂的平行四边形结构,保证手部角度不随手臂伸缩而变化。
3).驱动电机、减速传动机构全部下置,减轻手臂重量,使手臂的运动轻巧,机械惯量小,便于快速加减速,快速运动。
4).关节式结构,所有电缆通过手臂内部布置,只有在关节处有微小弯曲动作,简化了电缆布置,延长了电缆弯曲伸缩的寿命,并且布局美观。
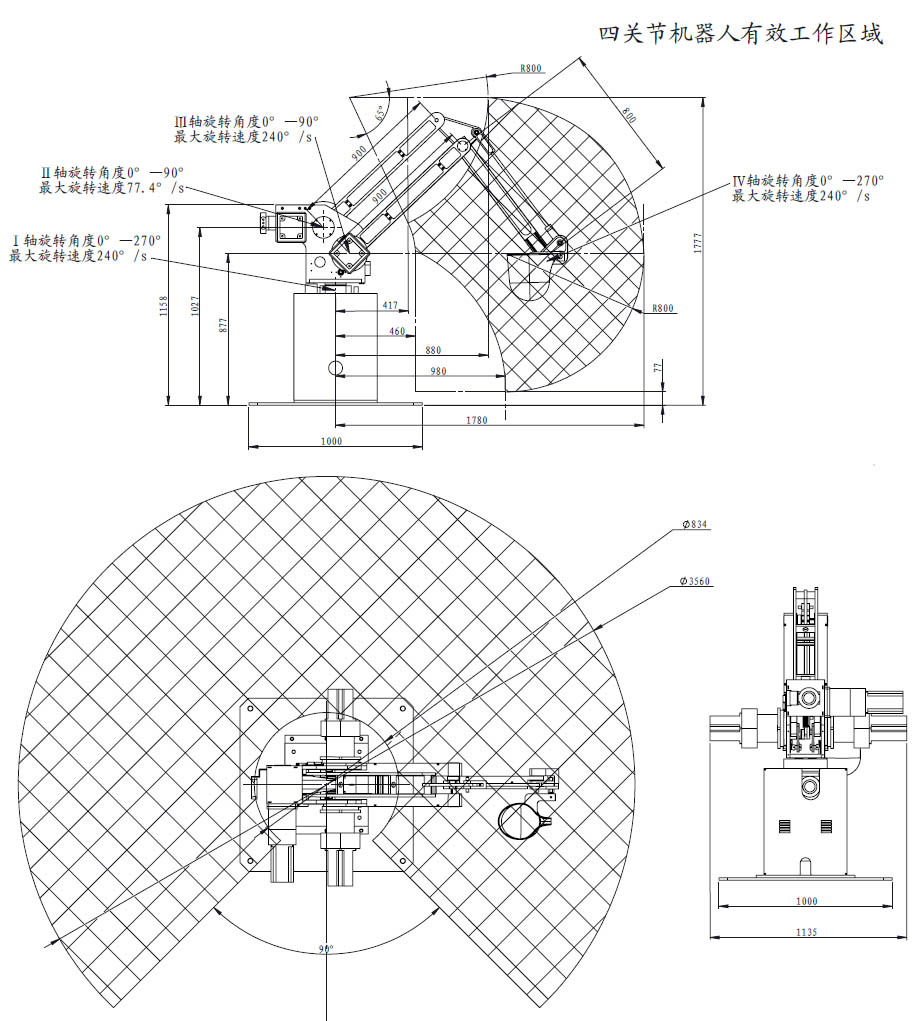
5).关节结构的巧妙设计,使手臂的伸缩范围达到极致,水平面作业范围可达270°,手臂伸缩范围为1500mm。
6).关节之间采用链条进行传动,重复定位精度可达1mm,并可适应400-600度的高温操作环境。
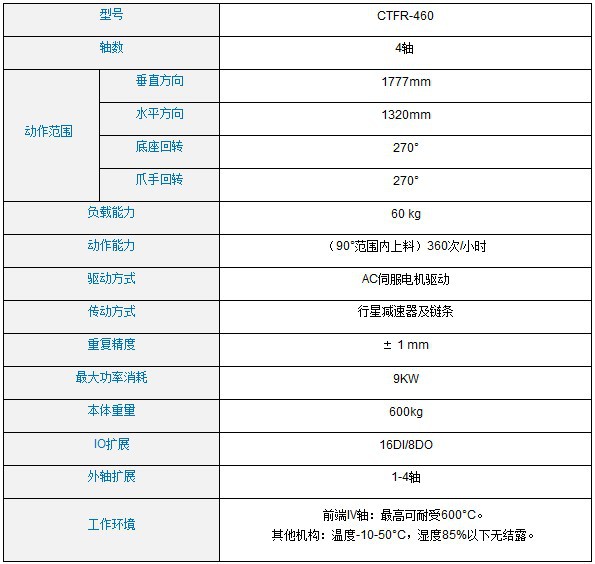
2.性能指标
3. 控制系统说明:
1). 以“基于PLC的4轴运动控制系统”为核心进行架构,通用性好,易使用,而且极为可靠。
2).图形化编程:用户编程可以采用坐标设定或示教法进行图形化操作。
3).模块化软件结构,开放的用户开发接口,便于开发针对于专用应用场合的应用程序。
4).多台机器人可组网运行;可远程编程、监控。
5).视觉系统软件单独封装为模块,便于维护。
6). 全部源程序自行开发,便于升级、修改、维护及客户化定制。

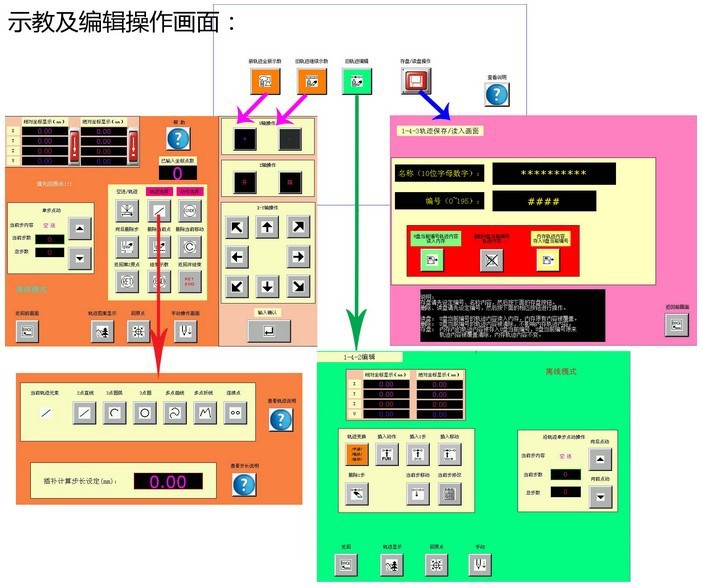
4.软件操作界面展示:



5.工作范围