
AGV用直流无刷电机驱动器:CNS-BLDCD-24V-200W
产品特色:
• 可驱动2台200W及以下直流24V无刷电机。
• 可兼容驱动韩国GGM、日本东方、台湾泰映、宁波中大、上海佛朗克等国内外常用于AGV上 的直流无刷电机。
• 宽电压支持,12V-30V驱动器均能正常工作。
• 最大输入总电流20A。
• 通讯方式RS232、RS422、RS485及模拟量控制方式可选。RS485可实现单总线多驱动器控制。
• 支持过流保护,因异常情况过流驱动器将输出故障状态。
• 数码管显示故障状态。
• 支持脱线保护,当一个电机发生故障,另外一个电机也停止运转。
• 实时反馈电机电流。
• 实时反馈驱动器输入电压,误差在0.3%以下,可利用其做电池过放保护。
• 电机里程反馈,可通过其计算出AGV的实时速度。
产品简介:
CNS-BLDC-Driver-24V-200W型AGV直流无刷驱动器,主要应用于200W及以下的差速AGV,通过拨码开关的第5位和第6位来匹配驱动电机的功率,以达到过流保护的目的。单套驱动器可同时驱动2台电机,接线少,体积小(L*W*H=134mm*79mm*30mm),可兼容驱动进口电机如日本东方、韩国GGM亦可驱动国产电机如宁波中大、上海佛朗克,即解决了国产驱动器用在AGV上AGV出轨又解决了对进口驱动器的依赖,在普通驱动器的基础之上添加了AGV所需的特殊性能如电压反馈、故障代码及里程计算等,具备极佳的驱动性能与极高的性价比。
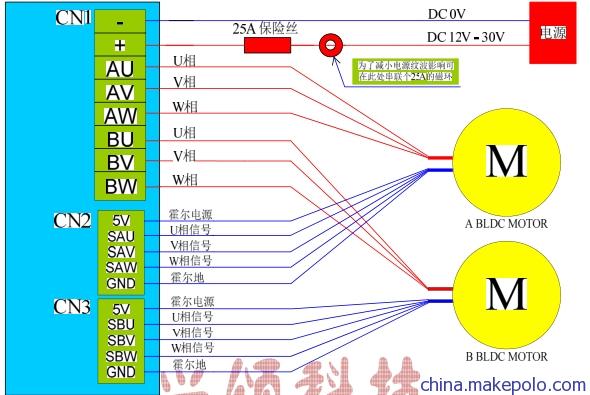
接线示意:

发送数据通讯协议:
AGV主控制器通过RS485或RS422或RS232向驱动器发送的数据协议
起始编 码 | 地址匹 配 | 数据返 回 | 故障清 除 | 运行模 式 | A电机控制 | B 电机控制 | A电机方向 | B 电机方向 | A电机速度 | B 电机速度 | 结束编 码 | CRC校 验 |
1Byte | 1Byte | 1Byte | 1Byte | 1Byte | 1Byte | 1Byte | 1Byte | 1Byte | 2Byte | 2Byte | 1Byte | 2Byte |
1帧16个字节
• 起始编码: 0xAA,通讯起始编码识别。
• 地址匹配: 地址编码通过拨码开关来选择,地址匹配后驱动器才能接收和返回数据,地址编码主要应用于单条总线的多个驱动器控制。
0x00 - 0x03,一共4个地址。
• 数据返回: 是否要求驱动器返回数据。
0x00: 驱动器不返回数据。
0x01: 驱动器返回数据(详见返回数据的通讯协议)。
• 故障清除: 清除驱动器的故障自我保护状态,驱动器故障状态下电机不能运转,必须清除故障后才能进行控制。
清除步奏:该位先发送0x01之后发送0x00才能进行故障清除。
• 运行模式: 备用。默认值为0x00。
• A电机控制码:
0x00:电机A控制失能,电机处于自由状态。(此状态下,电机轴处于自由状态)
0x01:电机A控制使能,电机属于控制状态。
0x02:电机A控制刹车,电机属于制动状态。(此状态下,电机轴不易被外力扭动)
0x03:电机A控制急刹,电机属于锁死状态。(电能损耗大,机构冲击力大,此状态下,电机轴不易被外力扭动)
• B电机控制码:
0x00:电机B控制失能,电机处于自由状态。(此状态下,电机轴处于自由状态)
0x01:电机B控制使能,电机属于控制状态。
0x02:电机B控制刹车,电机属于制动状态。(此状态下,电机轴不易被外力扭动)
0x03:电机B控制急刹,电机属于锁死状态。(电能损耗大,机构冲击力大,此状态下,电机轴不易被外力扭动)
• A电机方向:电机方向改变只能发生在在自由状态、制动状态、锁死状态下以及控制状态下速度为零的情况下,软件能够防止AGV主控制器误操作引起的高速状态下的电机方向切换。
0x00: 电机A正向运行。
0x01: 电机A反向运行。
• B电机方向:电机方向改变只能发生在在自由状态、制动状态、锁死状态下以及控制状态下速度为零的情况下,软件能够防止AGV主控制器误操作引起的高速状态下的电机方向切换。
0x00: 电机B正向运行。
0x01: 电机B反向运行。
• A电机速度: 电机A的闭环速度值,速度值的范围是1 – 4000,速度值超过4000取4000,分辨率高达4000分之1,AGV主控制器可以根据里程反馈来调整速度值,又可以高速响应AGV转弯特性。
第一个字节:速度高8位。
第二个字节:速度低8位。
• B电机速度: 电机B的闭环速度值,速度值的范围是1 – 4000,速度值超过4000取4000,分辨率高达4000分之1,AGV主控制器可以根据里程反馈来调整速度值,又可以高速响应AGV转弯特性。
第一个字节:速度高8位。
第二个字节:速度低8位。
• 结束编码:0x55,通讯结束编码识别
• CRC校验:CRC16校验值,校验的多项式是0XA001,校验结果是低位在前,高位在后,校验结果错误就丢弃该帧的数据。
返回数据通讯协议:
RS232与RS422反馈的是一帧16个字节,字节格式如下:
起始编码 | 地址编码 | A电机电流 | B电机电流 | A电机里程 | B电机里程 | 总线电压 | 故障状态 | 结束编码 | CRC校验 |
1Byte | 1Byte | 2Byte | 2Byte | 2Byte | 2Byte | 2Byte | 1Byte | 1Byte | 2Byte |
• 起始编码: 0x55,通讯起始编码识别
• 地址编码: 返回驱动器目前的地址编码,可以用来确认是总线上那个驱动器返回的数据。
地址编码: 0x00 – 0x03一共4个地址。
• A电机电流:电机电流分辨率是0.1A,最大返回量程是30A。
第一个字节:电流高8位。
第二个字节:电流低8位。
• B电机电流:电机电流分辨率是0.1A,最大返回量程是30A。
第一个字节:电流高8位。
第二个字节:电流低8位。
• A电机里程: 电机转动里程数,电机里程累积到65535后自动清0,可根据单位里程数进行里程的累积确认AGV处于哪个位置,根据里程除以单位时间获得实时速度。
电机转动圈数 = 里程数/电机磁极对数/电机减速比。
驱动轮行走距离 = (里程数/电机磁极对数/电机减速比/链条传动比) * π * 驱动轮直径。
• B电机里程: 电机转动里程数,电机里程累积到65535后自动清0,可根据单位里程数进行里程的累积确认AGV处于哪个位置,根据里程除以单位时间获得实时速度。
电机转动圈数 = 里程数/电机磁极对数/电机减速比。
驱动轮行走距离 = (里程数/电机磁极对数/电机减速比/链条传动比) * π * 驱动轮直径。
• 总线电压:测量电源供电电压,电压误差为0.5%以下,分辨率0.01V。
第一个字节:电压高8位。
第二个字节:电压低8位。
• 故障状态:驱动器返回自检或保护的故障状态,故障状态占一个字节。
1: A电机短路
2: B电机短路
3: A电机过流
4: B电机过流
5: A电机堵转
6: B电机堵转
7: A电机霍尔错误
8: B电机霍尔错误
• 结束编码: 0xAA,通讯结束编码识别
• CRC校验: CRC16校验值,校验的多项式是0XA001,校验结果是低位在前,高位在后,校验结果错误就丢弃该帧的数据。
RS485反馈的是一帧17个字节,字节格式如下:
RS485识别码 | 起始编码 | 地址编码 | A电机电流 | B电机电流 | A电机里程 | B电机里程 | 总线电压 | 故障状态 | 结束编码 | CRC校验 |
1Byte | 1Byte | 1Byte | 2Byte | 2Byte | 2Byte | 2Byte | 2Byte | 1Byte | 1Byte | 2Byte |
其中RS485识别码为0X00,其余16个字节与RS232及RS422相同!!!
注意事项:
※ 因产品安装问题需要自行设计散热器时请向本公司索取驱动器安装孔位的尺寸图及散热器安装要求说明,必须使用散热良好之散热器。
※ 保险装置客户自行配备,外置25A保险装置。25A是根据驱动器驱动2个200W的电机来选配的,是驱动器保护的最后屏障,请慎重选择保险装置,建议使用浙江茗熔电器保护系统有限公司生产的型号是RO15B aM 500V/25A(电动机保护专用)的熔芯及底座型号为RT18B-25的底座。 茗熔官网:()
※ 驱动器保险装置之前加一个25A的磁环可有效的抑制电源纹波对驱动器的影响。提高整个系统的稳定性,建议添加,对于有挂钩升降或者驱动升降之AGV,必须添加。
※ 东方无刷电机的HA、HB、HC对应本驱动器的SAW、SAV、SAU,接线时请注意。
※ 拨码开关重新设置好请断开驱动器电源后重启电源方可生效。
※ AGV在线充电时请使用优质的稳压电源,避免充电时电压过高对驱动器有所损伤。
产品保证:
本产品的保证原则是,制造者收到故障产品后,检查其原因。如果故障原因是制造者的原因,制造者负责更换或修理。免费更换或修理的保固期为 1 年。
但是,如果符合其次情况,则不属于保证的对象范围:
(1) 因用户不当操作、使用的情况下。
(2) 受到外围设备的异常影响时。
(3) 制造者以外的改造或修理的原因。
(4) 不可抗力。
制造者不负责本产品导致的损失。
订货号:
产品型号 | 产品类型 | 订货号 |
CNS-BLDCD-24V-200W | 直流无刷电机驱动器 | 0200002 |
CNS-Radiator-24V-200W | 适配驱动器之散热器 | 0300002 |



