桁架机器人配置说明
1、桁架架体采用高强度先进材料,长度及结构可根据用户现场需求制作。
2、齿条:国产。(台湾3Y 可选)
3、线轨:国产赛尔、博特。(日本THK 可选)
4、数控系统:西门子808,828,配置数控面板或彩色触摸屏的PLC。
5、与数控系统同品牌的伺服电机及驱动器(带抱闸)。
6、可选择自动循环料仓:八工位盘类料仓,齿轮加工料仓,管类循环料仓等。
7、实现功能:自动上下料、搬运、转工序、焊接、喷涂等功能。
8、电气元件:德国西门子、法国施耐德。
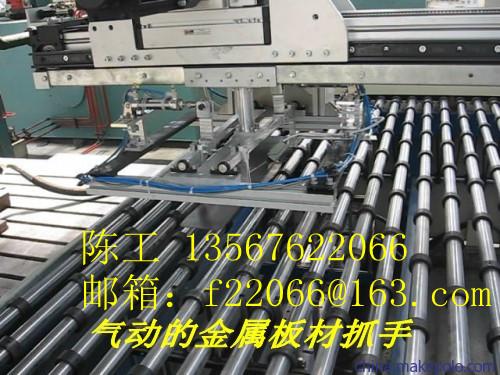
9、气动元件:日本SMC气爪和摆缸、电磁阀等。
上下料机器人手抓介绍
上下料机器人手抓也叫端拾器,是上下料机器人上最重要的一个外围设备,其主要用途是设计在机器人手臂终端来完成各种动作和指令。上下料机器人的所有工作最终都是有手抓来完成的。上下料机器人手抓的概念不同于人类的手的概念,只要能够完成对工件的有效抓取,并对工件不造成损害,我们都可称之为手抓。根据工作任务和被抓取工件的性质不同,机器人手抓一般采用电动、气动、真空吸取、液压夹紧几种抓紧方式,对于小型工件采用电动、气动和真空吸取的方式比较常见,而液压夹紧方式常常被用于大型的工件和工作环境比较恶劣的环境。在工厂自动化领域,最被广泛使用的是气动手抓和真空吸盘,因此我们以这类手抓为重点进行介绍。
机床自动上下料料仓简介
机床自动上下料料仓主要针对圆形零件设计的上下料料仓,由承放物料工位、循环驱动结构、物料推举机构和物料检测机构组成。
承放物料工位:每个料仓有很多工位,工位一般为偶数个,数量范围比较大。工位主要由底座板、支撑块、零件盘和3个导向轴组成。由底座板与链条连接完成循环转动,零件盘托举物料,导向轴起到物料举升的导向作用。
循环驱动结构:一个闭合的链条沿一个方向旋转,每转过一个角度,停下来一次,待该位置上的物料全部被抓走在转同一个角度,将下一个位置的物料传送来。
物料推举机构:每一个工位到达被抓取的位置后,由一个推举机构将物料推举到同一高度,以方便机器手抓走。
| 名称 |
桁架机器人 |
| 驱动形式 |
电动控制 |
| 材质 |
碳钢 |
| 连接形式 |
快换接头 |
|
|