简介工业气保焊接机器人是集计算机、电子、传感器、人工智能等多个方面知识于一体的现代化、自动化设备。
组成部分工业气保焊接设备主要有机器人本体和自动化焊接设备两大部分构成,国产焊接机器人的组成也不列外。机器人焊接是由一套完整的系统方案完成的,只有一台机器人是不够的,还配备相应的外围设备。
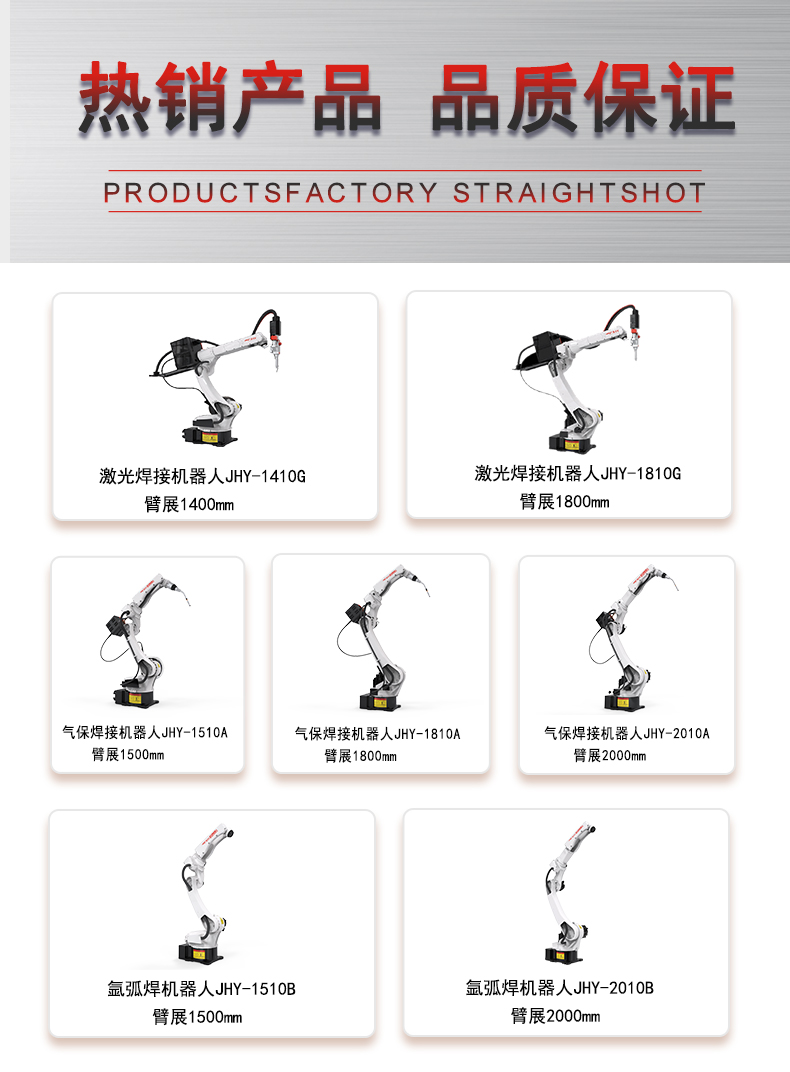
目前常用的焊接系统主要由以下5部分组成:1、机器人本体一般是由伺服电机驱动的6轴关节型机器人,由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。工业气保焊机机器人本体的任务是:准确让机械手末端(焊枪)到达系统要求的位置、姿态和运动轨迹。
2、控制柜控制柜是工业气保焊机机器人系统的神经中枢,包括计算机硬件、软件和一些专用电路,其任务是:负责处理工业机器人工作过程中的全部信息并控制其全部动作。
3、焊接系统包括焊接电源、专用焊枪、储气管道或装置、焊丝桶、送丝机构等。
4、焊接工装包括变位机或者翻转架、焊接平台等。
5、其他焊接传感器及系统安全保护设施。
您对此产品的咨询信息已成功发送给相应的供应商,请注意接听供应商电话。
对不起,您对此产品的咨询信息发送失败,请稍后重新发起咨询。