
关键词:运动控制系统、运动控制器、伺服电机运动控制、多轴运动控制系统。
该系统用户手册下载链接:运动控制系统用户手册【至工机电2012版】
http://www.csumtech.cn/Files_Download.aspx?tid=119&cid=123
1. 系统功能及用途:
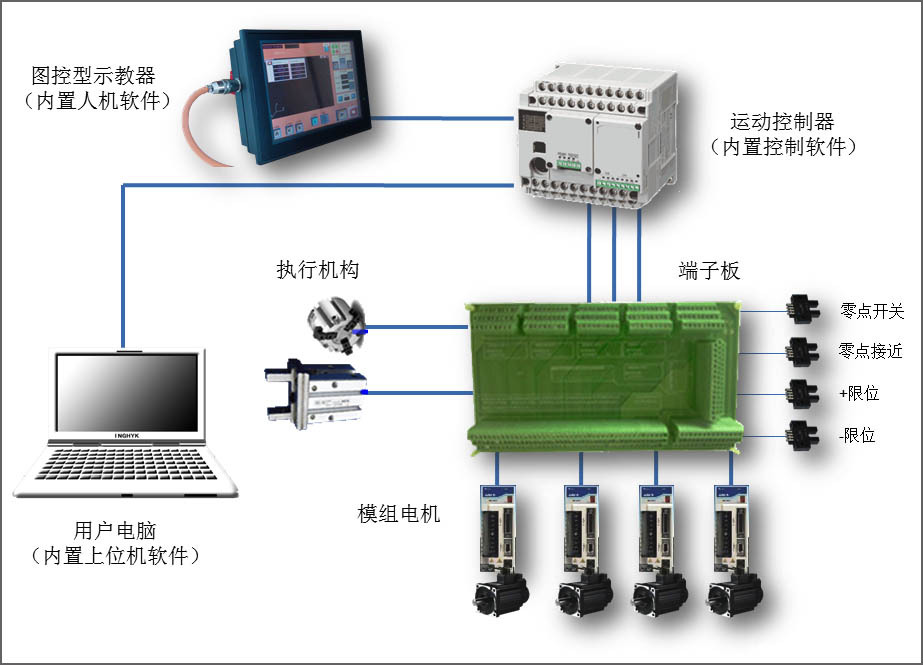
如下图所示,为满足广大用户对1-4轴运动控制系统的构建要求,我们以运动控制器、图控型示教器为核心部件,结合在其内部封装标准化的软件系统,为用户提供了一套完整的运动控制系统解决方案。
1.1 系统的基本功能:
1). 以脉冲方式提供对1-4轴模组电机(如伺服/步进电机)的驱动及控制;
2). 提供多路扩展的IO端口,为用户提供对扩展设备的系统整合;
3). 以图形化示教为编程方式,柔性化、简单化地实现用户的系统控制要求;
4). 开放上位机通讯标准,为用户的上位机通讯要求提供便利。
1.2 系统的主要用途:
1). 以大地坐标系为基本数学模型,为组合型1-4轴的直角坐标机器人、单轴机械手提供控制功能,可通过示教编程对运动轨迹进行程序序列的创建和修改,具备插补功能,同时可以逻辑化的整合多路IO扩展点以及大地坐标系外的运动轴(系统内被称为外轴)。
2). 在无数学坐标系的应用中,可以为非组合型的1-4轴模组电机系统提供控制方案,通过对各轴(在系统中被定义为外轴)进行独立的参数设置及示教编程,既可实现各轴的独立运行,又可设定逻辑联动,同样也可以逻辑化的整合多路IO扩展点。
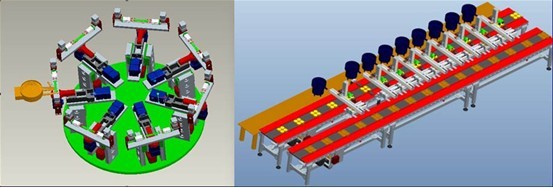
3).多工位运动控制子系统的组合与联动:用户可以使用该系统构建多个1-4轴运动控制子系统,并整合成为一个大系统。这其中,各子系统可以通过I/O通讯的方式实现多机位联动,如统一生产节拍、报警急停等,使该系统既保持模块化的结构,又统一成有机的整体。
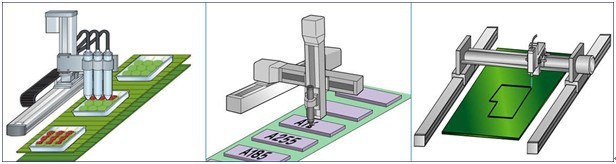
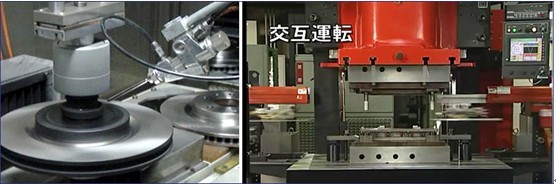
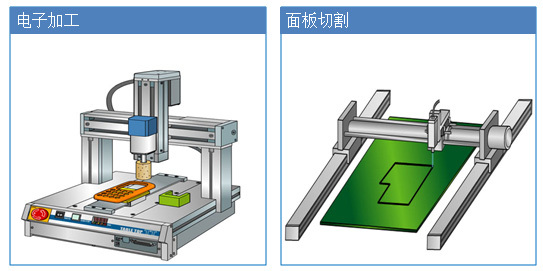
基于以上功能,该系统可应用于常见的点胶、滴塑、裱花、雕刻、喷涂、码垛、机床上下料、包装分拣、装配生产等各种应用领域及相关设备制造,在很大程度上为用户降低了技术开发难度,节约了系统开发周期。
2. 硬件简介:
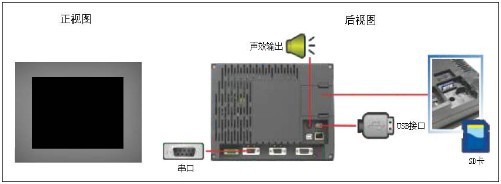
2.1 运动控制器:
该款运动控制器基于松下FP-X小型PLC进行构建,其主要硬件能力指标为:
程序扫描周期小于2ms / 5000步;
2路100KHz脉冲输出,2路20KHz脉冲输出;
串口通讯:RS232 / 485;
I/O扩展:提供8DI/8DO的微型扩展I/O模块。

下表为两款常用的运动控制器选型表:

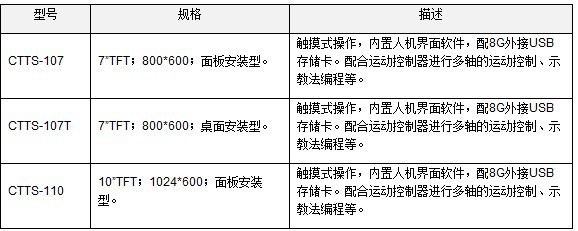
2.2 图控型示教器:
该图控型示教器基于工业触摸屏进行架构,具备绘图功能,配合运动控制器实现对运动轨迹的编程及图形生成,可扩展外接8G的USB存储卡,用于图形数据的存储及调用。
◆面板型:
◆桌面型:

下表为三款常用的选型信息:
3. 软件系统结构图:
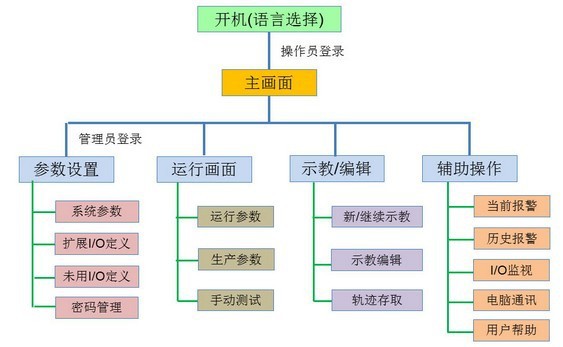
4.软件功能描述:
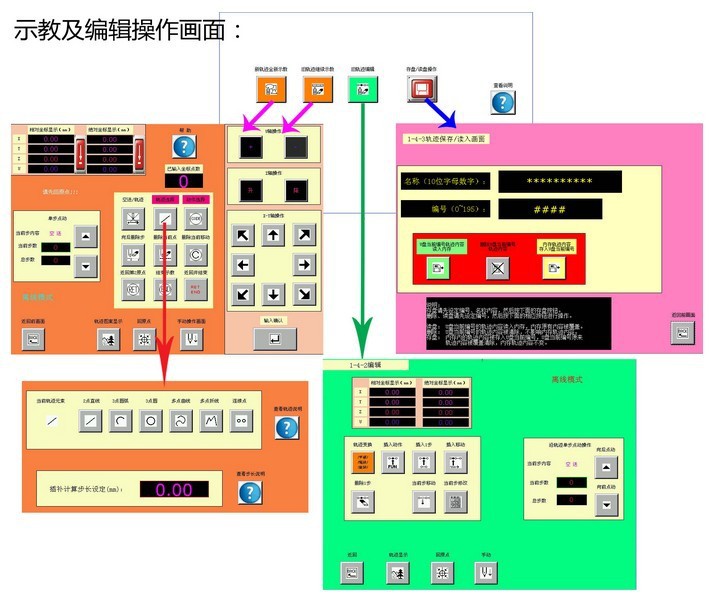
1)人机交互:即运动轨迹的录入、编辑、储存。支持的图案元素包括点、直线、3点圆弧、3点圆、折线、多点曲线、特殊功能(用户自定义),输入方法为引导示教式。
2)数据处理:按输入图案规划运动轨迹,完成插补计算,数据存储。
3)内置驱动:内置脉冲输出及与电机驱动器的接口及驱动,同时也包含用于位置测量,逻辑处理(限位信号,操作信号等)的信号的输入输出。
4)数据转存:输入的数据可通过USB接口进行拷贝转存。
5)用户接口:可通过I/O链接方式与任意品牌PLC交换数据,完成用户自定义控制功能。对用户方PLC的端口要求是5I/1O,通讯协议采用我方的开放的自有协议。
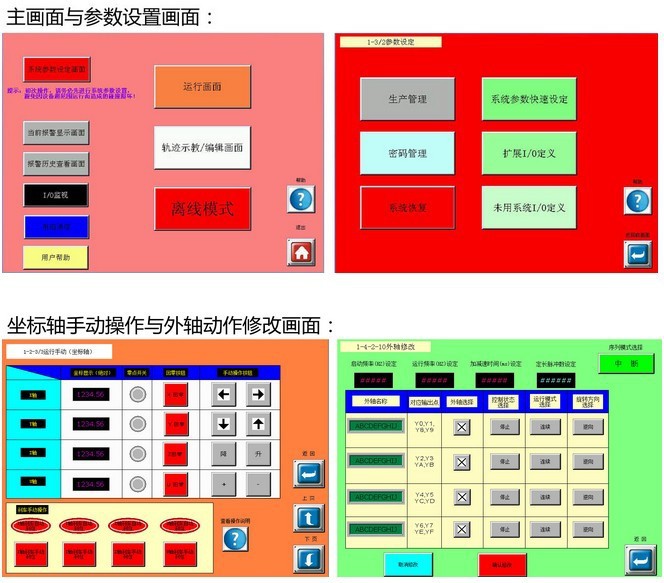
5.软件界面展示:
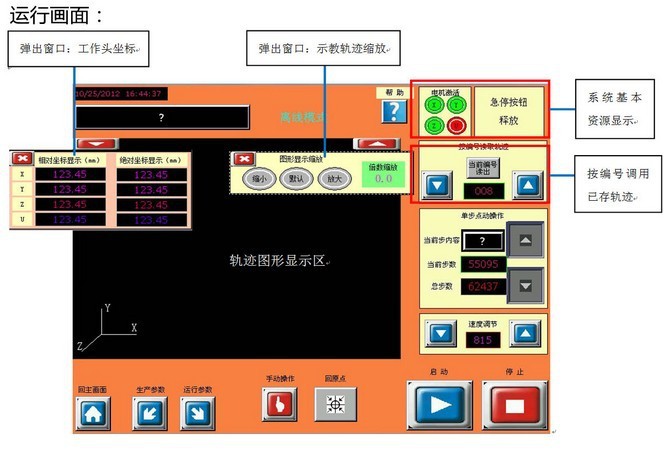
6. 系统优点:
1).模块化、柔性架构:所有的工位均为独立的控制系统,既可独立运行也可组合成整线联动运行,系统的延展性和可维护性强。
2).免代码图形化编程:采用示教法进行编程,以示教回放的方式操作系统运行,可规划任意运动轨迹,简单、易用、灵活,使用户免去代码编程之苦。
3).整体系统可移植性强:由于硬件、软件均采用模块化结构设计方式,使系统具体具备很强的移植性。针对不同用户的具体应用,工程师在采用相同软硬件平台的基础上,通过快速增加或裁减软硬件配置即可快速构建起实用性极强的用户系统。
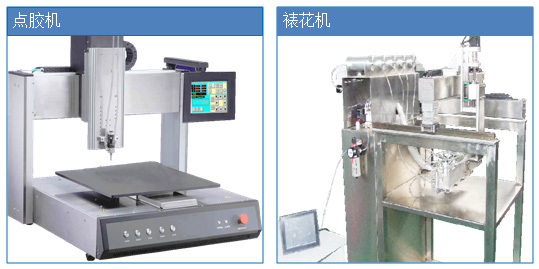
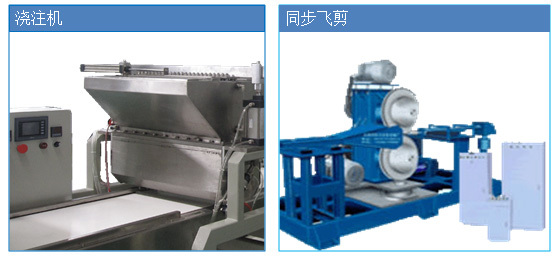
7.具体应用案例:
1)各种单臂机械手、梁式机械手
2)各种点胶机、滴塑机、裱花机等
3)浇注机、飞剪等
4)机床自动上下料:
http://www.csumtech.com/cn/NewsShow.aspx?tid=337&cid=338&id=284
5)自动喷码机:
http://www.csumtech.com/cn/NewsShow.aspx?tid=337&cid=338&id=283
6)直角坐标机器人在糖果裱花机中的应用:
http://www.csumtech.com/cn/Show.aspx?tid=101&cid=102&sid=341&id=505





