关键词:直角坐标机器人、单轴机械手、工业机械手、单臂机械手、梁式机械手、线性模组、电缸。
1. X-Y架构直角坐标机器人的应用:
应用:工作范围为XY平面,建议负载伸出长度不超过500mm,适用于两维平面内目标的搬运、移动等。
2. X-Z架构直角坐标机器人的配置:
◆ X轴:可采用滚珠丝杠、同步皮带或齿轮齿条驱动型的机械臂。
◆ Y轴:可采用滚珠丝杠、同步皮带或齿轮齿条驱动型的机械臂。
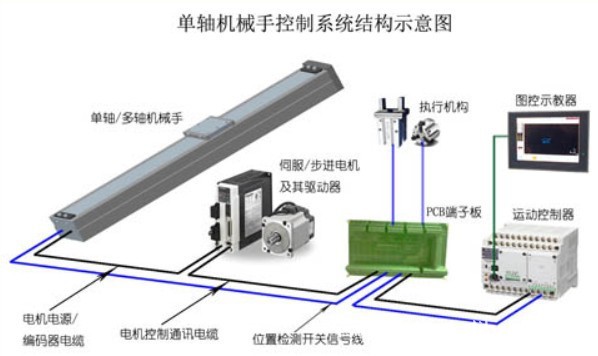
3.机器人控制系统的选型及功能描述:
1).控制原理图:
2).选型表示例:
| 序号 | 选择 | 名称 | 规格及配置 | 用途 | 品牌 | 型号 | 单位 | 数量 |
| 1 | 必选 | 运动控制器 | 内置运动控制系统软件,最多可驱动4路模组电机。另提供8DI/8DO嵌入操作功能。 | 主控制器 | Panasonic | FPX-C30T-IN8/TR8 | 台 | 1 |
| 2 | 必选 | 图控型示教器 | 7"TFT,内置图控软件,桌面安装型。 | 显示与编程 | Csumtech | CTTS-107T | 台 | 1 |
| 3 | 必选 | PCB端子板 | 最多可提供5路电机驱动器的转接端子。 | 端子板 | Csumtech | CTPB-1 | 台 | 1 |
| 4 | 可选 | 拖链 | 适配于各种机械臂,每臂用1套。 | 电缆固定 | Igus | E2 | 套 | 2 |
| 5 | 可选 | 控制箱 | 配置完整,尺寸(L)524*(W)420*(H)615mm。 | 控制柜 | Csumtech | CTEC-615 | 套 | 1 |
3).系统功能描述:
◆运动控制:实现了1-4轴的组合运动控制,实现了在伺服电机驱动下的直线、平面、三维、三维加旋转的精确定位运动及轨迹运行。
◆人机交互:即运动轨迹的录入、编辑、储存。支持的图案元素包括点、直线、3点圆弧、3点圆、折线、多点曲线、特殊功能(用户自定义),输入方法为引导示教式,按输入图案规划运动轨迹,完成插补计算,数据存储。
◆拓展控制:可是实现轨迹运行和电机运动控制(电机变速运行)、I/O控制的有机集成和逻辑设计。
◆图形化编程:用户编程可以采用坐标设定或示教法进行图形化操作。
◆自动/手动模式:提供了手动和自动运行两种模式,用户在手动模式线可以实现对于每一轴电机的调试。
◆用户接口:可通过I/O链接方式与任意品牌PLC交换数据,完成用户自定义控制功能。对用户方PLC的端口要求是5I/1O,通讯协议面向用户开放。
◆多工位I/O联动:通过I/O通讯的方式实现多机位联动,如统一生产节拍、报警急停等。
◆权限管理:提供了二级用户权限设置和安全管理,即系统管理员可以设置操作密码,用户管理员可以设置操作员及为其分配权限。
◆多语言操作:提供了中/英文可选的操作语言。
4). 软件操作界面展示:

4.系统优点:
1).模块化、柔性架构:所有的工位均为独立的控制系统,既可独立运行也可组合成整线联动运行,系统的延展性和可维护性强。
2).免代码图形化编程:采用示教法进行编程,以示教回放的方式操作系统运行,可规划任意运动轨迹,简单、易用、灵活,使用户免去代码编程之苦。
3).整体系统可移植性强:由于硬件、软件均采用模块化结构设计方式,使系统具体具备很强的移植性。针对不同用户的具体应用,工程师在采用相同软硬件平台的基础上,通过快速增加或裁减软硬件配置即可快速构建起实用性极强的用户系统。
5. 实物照片:

6. 应用案例:
◆产品检测与喷码:
◆灌装与滚涂:

◆推盘与排盘: