关键词:运动控制系统、运动控制器、伺服电机运动控制、多轴运动控制系统。
该系统用户手册下载链接:运动控制系统用户手册【至工机电2012版】
http://www.csumtech.cn/Files_Download.aspx?tid=119&cid=123
关键词:运动控制系统、运动控制器、伺服电机运动控制、多轴运动控制系统。
1. 简介:
此款运动控制器基于松下小型FP-X系列PLC进行构建,具有结构紧凑、成本低廉、运行稳定可靠等特点。
2. 硬件信息:
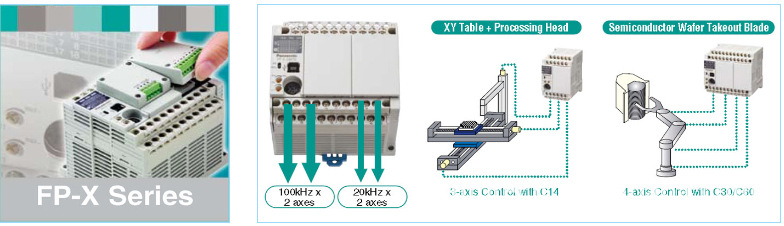
1). FP-X系列1-4轴运动控制器:FPX-C30/40/60T
◆高速运算能力:
通过配置32为RISC处理器,实现了小型PLC的超高速运算处理,5000步的扫描时间不到2ms, 高速PLC是设备高性能化中所不可缺少的。

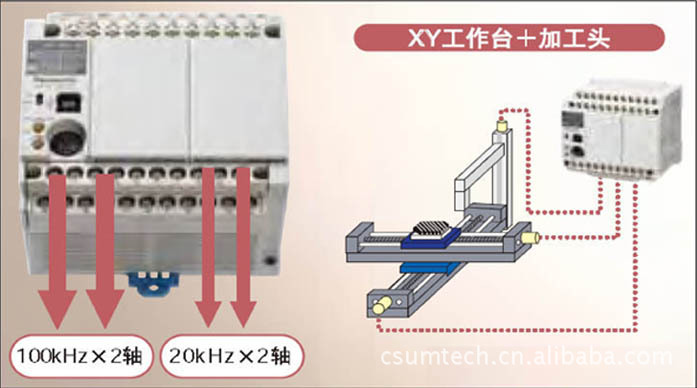
◆内置了4轴脉冲输出功能(晶体管输出型)
晶体管输出:2轴100KHz + 2轴20KHz。
已往PLC中必须使用高级机种或定位专用单元,或使用2台以上的多轴控制设备,但FP-X晶体管输出型产品只使用了1台控制单元,既可节省空间,又能降低成本。
◆使用扩展插件来,精巧快捷:
C30,C40可以扩展2块,C60可以拓展3块,无须增加安装面积即可提高功能,扩展插件多样化(I/O扩展、通讯接口等),可应对多种应用。最大I/O控制点数为300点。
3. 软件信息:
1).软件系统功能描述:
◆运动控制:实现了1-4轴的组合运动控制,实现了在伺服电机驱动下的直线、平面、三维、三维加旋转的定位运动及轨迹运行。
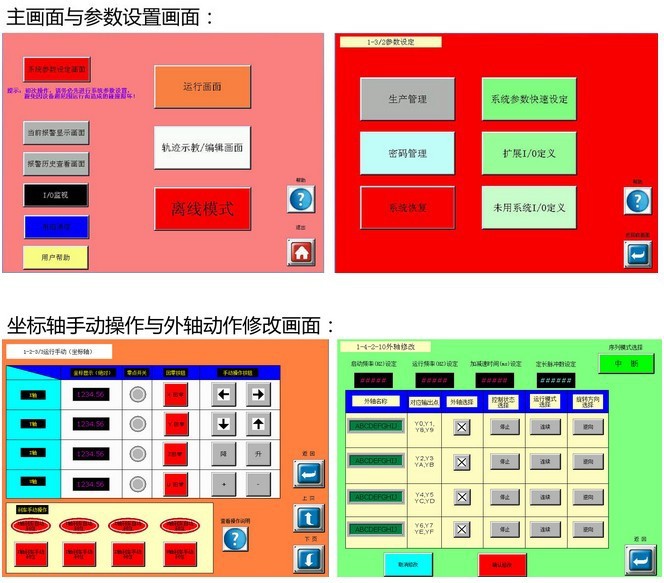
◆人机交互:即运动轨迹的录入、编辑、储存。支持的图案元素包括点、直线、3点圆弧、3点圆、折线、多点曲线、特殊功能(用户自定义),输入方法为引导示教式,按输入图案规划运动轨迹,完成插补计算,数据存储。
◆拓展控制:可是实现轨迹运行和电机运动控制(电机变速运行)、I/O控制的有机集成和逻辑设计。
◆图形化编程:用户编程可以采用坐标设定或示教法进行图形化操作。
◆自动/手动模式:提供了手动和自动运行两种模式,用户在手动模式线可以实现对于每一轴电机的调试。
◆用户接口:可通过I/O链接方式与任意品牌PLC交换数据,完成用户自定义控制功能。对用户方PLC的端口要求是5I/1O,通讯协议面向用户开放。
◆多工位I/O联动:通过I/O通讯的方式实现多机位联动,如统一生产节拍、报警急停等。
◆权限管理:提供了二级用户权限设置和安全管理,即系统管理员可以设置操作密码,用户管理员可以设置操作员及为其分配权限。
◆多语言操作:提供了中/英文可选的操作语言。
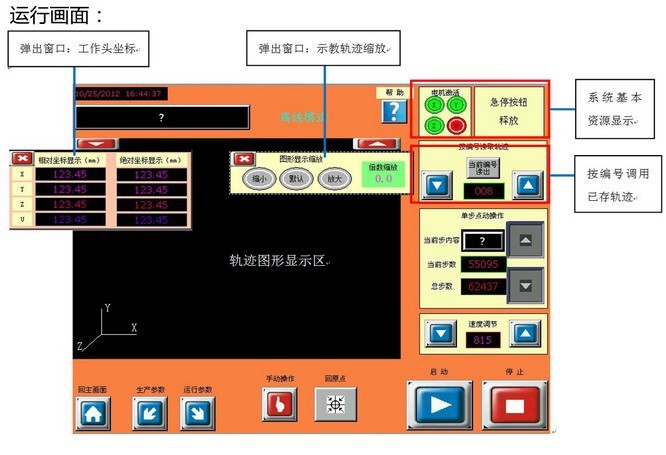
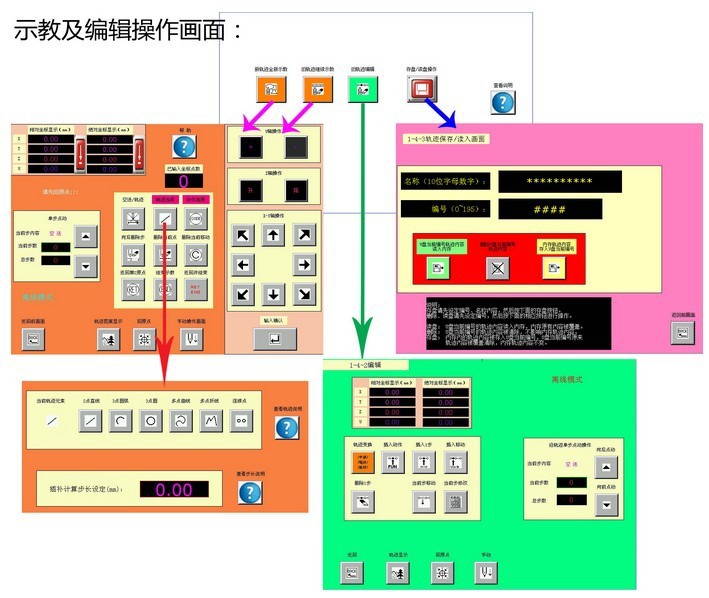
2). 软件操作界面展示:
4.系统优点:
1).模块化、柔性架构:所有的工位均为独立的控制系统,既可独立运行也可组合成整线联动运行,系统的延展性和可维护性强。
2).免代码图形化编程:采用示教法进行编程,以示教回放的方式操作系统运行,可规划任意运动轨迹,简单、易用、灵活,使用户免去代码编程之苦。
3).整体系统可移植性强:由于硬件、软件均采用模块化结构设计方式,使系统具体具备很强的移植性。针对不同用户的具体应用,工程师在采用相同软硬件平台的基础上,通过快速增加或裁减软硬件配置即可快速构建起实用性极强的用户系统。
4.选型信息:
序号 | 名称 | 控制轴数 | 对外通讯 | 客户端I/O | 功能描述 |
1 | FPX-C40T-IN8/TR8 | 3 | RS232/485 | 示教:8DI/8DO;
预留:3DI。 | 常规的三轴(组合或非组合)控制,示教编程。位置型号为:零点;零点接近;±限位。 |
2 | FPX-C60T-IN8/TR8 | 4 | RS232/485 | 示教:8DI,8DO;
预留:11DI,2DO。 | 常规的四轴(组合或非组合)控制,示教编程,转矩控制,刹车控制。位置型号为:零点、零点接近、±限位。 |
3 | FPX-C60T-IN8/TR8 | 4 | RS232/485 | 示教:8DI,8DO;
预留:11DI,2DO。 | 4轴直角坐标机器人控制系统(含匀料码垛操作模型),示教编程,转矩控制,刹车控制。 |






