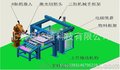
一、 设备布局示意图
1、整体结构(图为示意图)
二、设备动作分解示意
1,人工将料框推到位,电磁吸盘下降将工件一排吸起
2,吸盘将工件吸起旋转后放置于输送机构上
3,阻挡器挡住工件,下面定位机构将工件卡入定位销并顶起
4,工件顶起后,两侧的定位对中机构对顶起的工件进行对中定位。
5,对中机构退出,上部吸盘下降将工件吸附上升,顶升机构下降。
6,机器人带激光头按照路径进行切割,完成后吸盘旋转再切割另一端。
7,切割完成后吸盘下降将完成工件放置于输送带上,并输送到下料机构。
三,设备整体配置清单
1,3轴机械手(含电磁吸盘),非标定制
2,工件输送机构,非标定制
3,下料机构,非标定制
4,自动定位对中机构,非标定制
5,6轴工业机器人,ABB
6,光纤激光器
北京安培通科技有限公司主要从事工业机器人及机器视觉应用为主的系统集成服务商,公司主要服务的行业有:汽车及零部件、新能源汽车、电子行业、食品饮料行业等。在机器人应用领域我们主要聚焦在以下应用:装配、码垛、喷涂、焊接等;在新能源汽车行业我们成功开发了换电机器人实现3分钟换电池,并已经取得相关国家发明专利;在机器视觉应用领域,公司主要聚焦在饮料罐在线检测仪产品的开发和推广。咨询热线:010-59418496。